 内閣府 総合科学技術・イノベーション会議が主導する革新的研究開発推進プログラム(ImPACT)タフ・ロボティクス・チャレンジの一環として,大阪大学,神戸大学,東北大学,東京大学,東京工業大学らは,従来の建設機械と比較して,作業性・機動性を飛躍的に高めた災害対応重作業ロボット(建設ロボット)の実験機を開発した(ニュースリリース)。
内閣府 総合科学技術・イノベーション会議が主導する革新的研究開発推進プログラム(ImPACT)タフ・ロボティクス・チャレンジの一環として,大阪大学,神戸大学,東北大学,東京大学,東京工業大学らは,従来の建設機械と比較して,作業性・機動性を飛躍的に高めた災害対応重作業ロボット(建設ロボット)の実験機を開発した(ニュースリリース)。
土砂崩れや建物の倒壊などの災害対応作業で中心的な役割を担う油圧ショベルは,大きな力で地面を掘削する機械のため,繊細な力のコントロールや微細な作業は得意としていない。このため被災現場の状況によっては現場への投入が困難な場合があった。また,使用している機器の制約から,駆動システムに大きなヒステリシスと0.1~0.2sec程度の無駄な時間があり,様々な制御則,とくにサーボ制御の織込みは容易ではなく,自在な運動特性を実現することが難しい。
災害対応では,遠隔で機械を操作できることが必要。油圧ショベルには,ラジコンの遠隔操縦装置がオプションとして準備されているが,多くは100m以内の距離からの直視による遠隔操作であり,災害現場への対応としては十分ではなかった。
画像伝送を用いた長距離の遠隔操作には無人化施工システムがあるが,比較的定型的な作業に限定されること,作業性を高めるためには油圧ショベルの周囲に複数のカメラ車を配置する必要があることなど,使用できる状況は限定されている。また遠隔操作時は作業効率が搭乗操作時の60%程度に低下することが課題となっていた。
今回開発した建設ロボットによれば,遠隔でロボットを操縦するオペレーターが,まるで対象物を触っているかのような反力と触覚を感じながら,精密で確実な作業ができる。また,ロボットの外にカメラを置かなくとも,対象物や地形を,視点を変えながら見ることができ,また,霧がかかっていても見ることができるため,精密な作業や複雑な地形での移動が容易になる。
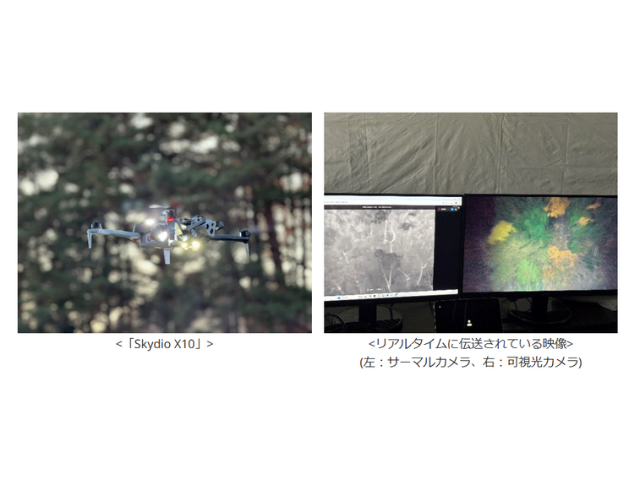
今回,オペレーターの視界確保には有線給電ドローンを用いた。一般の無人化施工では,カメラ車が第三者視点を提供するが,発災時の緊急対応では難しい。そこで,ドローンを利用することとした。研究では,電線を用いた給電ケーブルにより,送電を行うことで長時間の飛行を実現した。これにより,オペレーターが見たい視点にドローンを飛行させ,その点から画像情報を取得することが可能となる。
また,車体に取り付けた複数のカメラ映像を,画像処理で合成して俯瞰画像取得する方法は,自動車などにも採用されており,運転操作を容易にするものとして知られている。ただし,自動車の例では,俯瞰画像の視点は一点に固定されており,変更することはできない。今回,新しい画像処理アルゴリズムを開発して,ロボット本体に搭載した4個の魚眼カメラの映像を合成し,オペレーターに,任意視点からの俯瞰映像を,リアルタイムに提示することを可能とした。
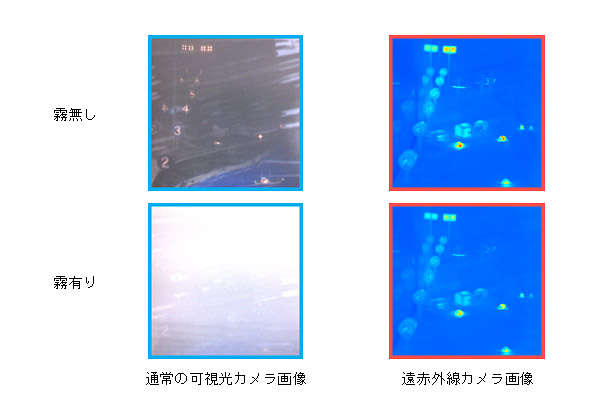
さらに,ロボットの遠隔操作では一般には可視光の高解像度カメラをロボットに搭載して周辺の状況把握を行なうが,災害現場では霧の発生等により,可視光カメラでは状況の確認ができない場合が想像される。そこで今回,波長の長い光を観測できる遠赤外線カメラを活用することにより,状況の観察が困難な霧などの悪環境下でも,周囲状況を把握してロボットを操作できるシステムを開発した。これにより,霧のような悪環境であってもロボットの操作が可能となった。
開発したロボットでは,今回性能を確認した要素技術以外にも,複数の有用な要素技術の開発を行なっているという。今後,順次それらの要素技術の評価を進める。また,より高い作業性,対地適応性の実現を目的として,2重旋回機構と複腕を有する新しいロボットの開発を進めており,このロボットに開発した要素技術を統合して搭載する計画。