 熊本大学は,路面環境の変化に強い自動運転計算法(アルゴリズム)の基礎研究成果を発表した(ニュースリリース)。
熊本大学は,路面環境の変化に強い自動運転計算法(アルゴリズム)の基礎研究成果を発表した(ニュースリリース)。
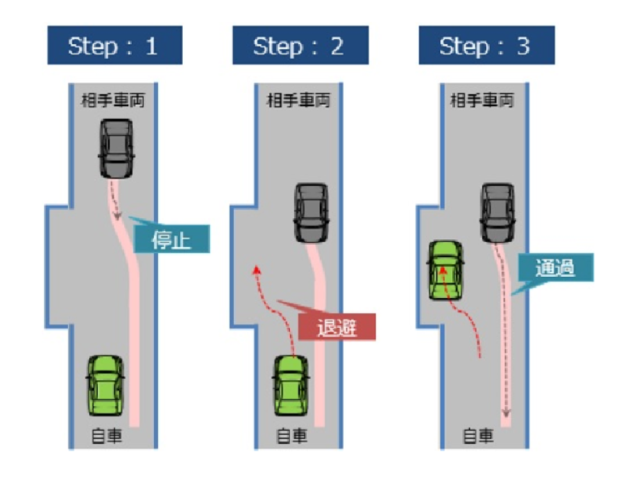
近年,自動運転に関する研究開発が盛んに行なわれている。自動運転する際,所定の経路に沿って車が移動するためには「ハンドルをどのタイミングでどう動かすか?」といった,状況に応じた制御が必要不可欠であり,経路に沿って進む経路追従アルゴリズムは,その中核をなす技術。
従来の経路追従アルゴリズムでは,自動車をどう操作すればどう動くかといった挙動の詳細を表現した数理モデルが一つに定まっているものとして答えを導いているが,数理モデルによって導かれる自動車の挙動と実際に動かす自動車との挙動間に誤差があるときは,従来の経路追従アルゴリズムでは誤差が埋まらず,うまく機能しなかった。
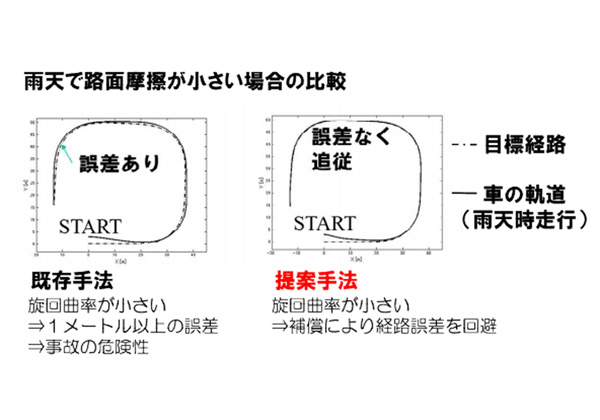
このような場合たとえば,晴天時にうまく動作する自動運転システムであっても,雨天や悪路などでは路面の摩擦係数(グリップ力)などが大きく変化するため,追従性能が低下し,自動運転の失敗やそれに伴った事故の要因となりえる。
これに対し,研究では今回,独自に開発した“モデル誤差抑制補償器” を利用した,路面環境変化に強い経路追従アルゴリズムを開発した。具体的には,実際の自動車の挙動と数理モデルの挙動の差の信号を,随時フィードバック信号として受け取り,補正することによって,路面環境変化に強いアルゴリズムを実現した。
今回開発したアルゴリズムだと,通常路面や晴天時だけでなく,悪路あるいは雨天・悪路時でも同様に目的の経路に沿った運動制御が期待できるという。現状では,計算機シミュレーションをベースとした基礎研究段階だが,既存のシステムへの実装が容易な手法であることから,実用化への道筋がついた技術として期待が持てるとしている。