 新エネルギー・産業技術総合開発機構(NEDO)プロジェクトにおいて,イクシスリサーチは7月26日,川崎市内において同社が開発した橋梁点検用ロボットの実証実験を行なった(ニュースリリース)。
新エネルギー・産業技術総合開発機構(NEDO)プロジェクトにおいて,イクシスリサーチは7月26日,川崎市内において同社が開発した橋梁点検用ロボットの実証実験を行なった(ニュースリリース)。
橋梁やトンネルなどの社会インフラの老朽化に対応するための十分な資金と高度な維持管理の専門知識を有する人材不足が,大きな社会問題となっている。
NEDOでは2014年度から「インフラ維持管理・更新等の社会課題対応システム開発プロジェクト」において,インフラ構造物に対して人間の立ち入りが困難な箇所へ移動し,インフラの維持管理に必要な情報を取得するロボットの研究開発を推進している。
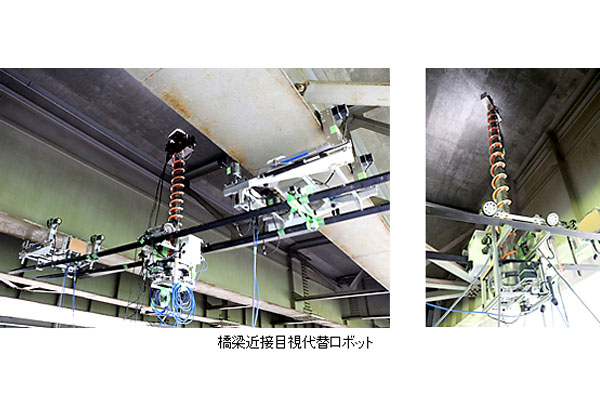
このプロジェクトにおいて,イクシスリサーチは,富士フイルムおよび首都高速道路技術センターと共同で,橋梁点検用のステレオカメラ(複眼式撮像装置)を搭載した橋梁近接目視代替ロボットを開発している。
このロボットは,橋の鋼桁下(こうけたした)フランジ(I型の鋼桁の下部水平フランジ部分)を移動しながら鋼桁を撮影し,撮影画像を画像処理して近接目視点検および点検調書を作成することができる。
実証実験では,主桁吊下げ型目視点検ロボットが桁下を移動し,桁の撮影および画像処理を行うことで損傷を検出し,近接目視を主体とする点検の支援が可能かなど実用化に向けた検証を行なった。
また今回の実証実験結果について,橋梁点検を数多く実施している複数の点検業者から,使い勝手やデータに関する客観的評価なども提案してもらい,これらの結果も踏まえ,早期の実用化を目指す。
このロボットが今後活用されることにより,従来の橋梁点検のための高架下への足場の設置や,高所作業車または橋梁点検車の使用に伴うコスト高を削減するとともに,橋上の交通規制を最小限にすることで,橋梁維持管理の効率化が期待できるとしている。
関連記事「NEDO,インフラロボットの開発を強化」「岡山大らの水中ロボット,海域での嵌合実験に成功」「NEDOら,災害調査ロボットの実証実験を開始」