









 岡山大学の研究グループと水中ロボットメーカーの広和は,ロボット制御知能3D-MoSを搭載した「ももたろう岡大1号」を用いた,和歌山県の実海域(水深4~5mの港内)での嵌合実験を実施した(ニュースリリース)。
岡山大学の研究グループと水中ロボットメーカーの広和は,ロボット制御知能3D-MoSを搭載した「ももたろう岡大1号」を用いた,和歌山県の実海域(水深4~5mの港内)での嵌合実験を実施した(ニュースリリース)。
「ももたろう岡大1号」は,従来型の遠隔操作型水中ロボットROV(Remotely Operated Vehicle)に,複眼カメラと3D-MoS制御知能を搭載した長時間潜航/作業対応自律制御型水中ロボット。
現在,深海用水中ロボットには水中汚染物(放射能汚染物等含む)の発見・回収,深海底地形調査・資源回収,機雷撤去,水産資源育成・捕獲、海難事故対応等さまざまなニーズ側からの期待が集中している。
しかしながら,従来の2,000m級深度の水中ロボットでは,深海における①長時間連続航行②高精度な自律的作業③故障・本体喪失という課題があった。一方,ロボット制御技術においては,主に視覚情報に頼ったVisual Servoing技術により地上作業用ロボットの実用化が進んでいるが,対象物の3次元空間(3D)高精度認識や環境変化に応じた自律的対応(環境対応型)は進んでいないなどの課題があった。
研究グループは,カメラを複眼構成としたVisual Servoing技術をベースに,①多機能センシング(形状,色調,温度,放射線等)によるロボット内部での静・動的不定形対象物の自動構築・認識,②認識対象物への自立的働きかけ,③対象物への働きかけ後の環境変化に対応するための新しいロボット制御知能3D-MoSを開発した。
3D-MoS制御は,複眼動画像に対する実時間認識が可能であり,①水中対象物の3次元位置・姿勢自動認識可能②海底での自動充電可能③長時間潜航/作業を継続できる自律制御型水中ロボットにつながる④移動対象物の追尾制御可能という特長を持ち,自律制御AUV(Autonomous Underwater Vehicle)化を実現した。
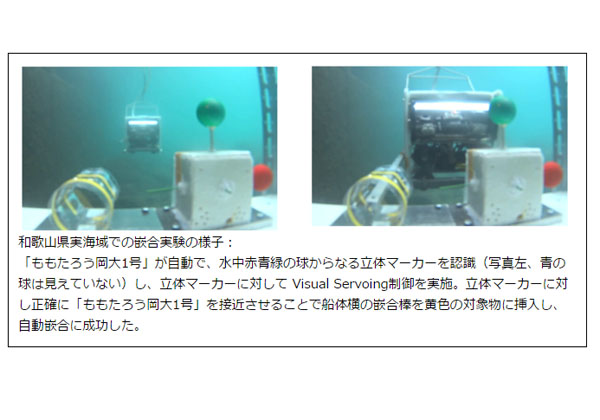
実海域での実験はプールでの実験と異なり,海流と波による動揺があったが,ロボットは3D-MoS制御により振動を抑制して自動嵌合に成功し,3D-MoS制御の3次元動画像認識と誘導制御の有効性と,長時間潜航/作業が可能であることが実証された。
実験の成功により,ソナーを用いた遠方(100m程度を想定)からマーカー近く(1~2m)への誘導制御と,カメラを複眼構成としたVisual Servoingを組み合わせることで,1.充電装置近傍へのアプローチ,2.充電装置と3D-MoS/AUVとの嵌合 を全自動で行なうことができる目途をつけることができた。
この技術を登載したロボットの開発が進めば,自動給電による長時間の自律化連続運転/作業が行なえることから,(ア)水中放射能汚染物の回収,(イ)深海底資源探査・回収(サンプリング含),(ウ)(深海)水中未確認生物の発見・回収ならびに生態観察,(エ)地球構造観察(海底地殻変動等),(オ)水産(栽培漁業・中間育成),(カ)機雷撤去などへの利用が期待されるとしている。
関連記事「シャープとアマノ,自律走行式ロボット掃除機を開発」「NEDOら,災害調査ロボットの実証実験を開始」「JAMSTEC,海底探査用レーザースキャナーを開発」
















