2. 回転式LED送信機
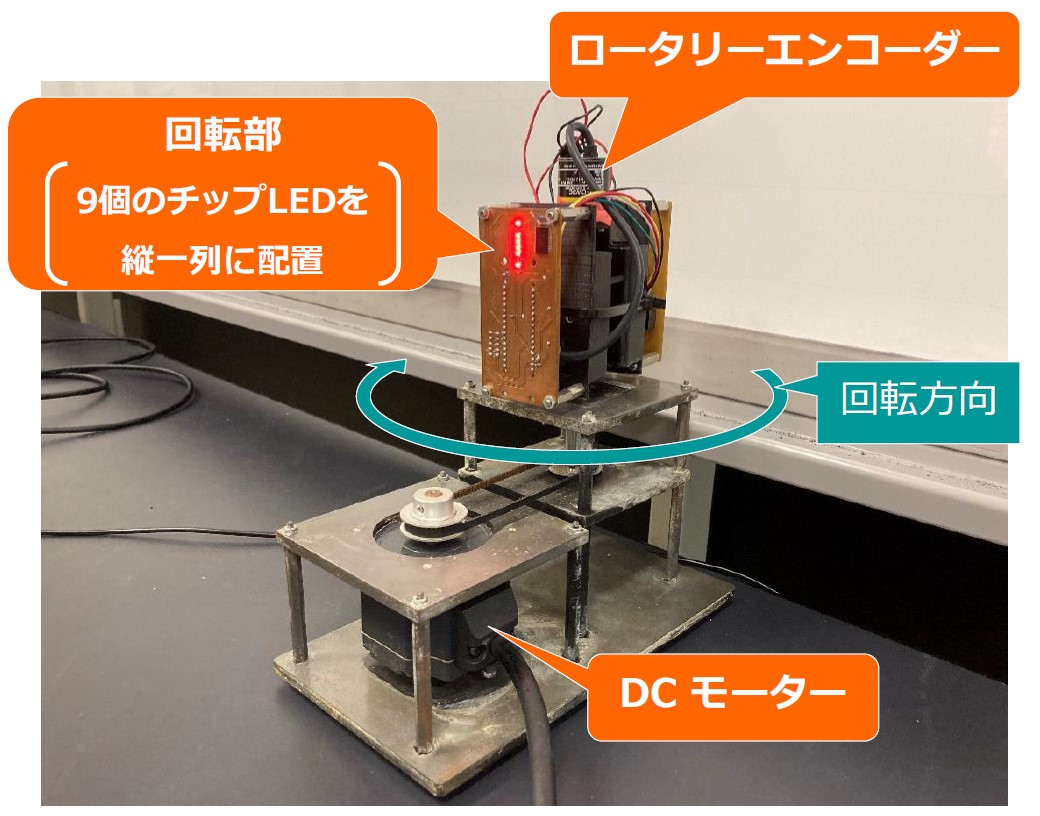
図1に筆者らが開発した回転式LED送信機の試作機を示す。本送信機は大きく分けて回転部とDCモーターで構成されている。回転部の側面には9個のチップLEDが縦一列に配置されており,図からは分かりにくいが,その横にLEDドライバーが取り付けられている。回転部の上部にはロータリーエンコーダーが取り付けられている。
また,この図では見えないが,回転部の中にはマイコン(Arduino Nano)とそれを駆動するバッテリーが搭載されている。本送信機の回転方向は図中の矢印で示している通り,垂直方向を軸として回転する。
本送信機の動作について説明する。まず,DCモータ ーによって回転部が図1の矢印の方向に回転する。その際,連動して回転するロータリーエンコーダーが回転1度毎にクロック信号を出力する。このクロック信号はマイコンに送られ,マイコンはそのクロック信号に応じてLEDの点灯パターンを,LEDドライバーを介して切り替える。本研究ではOOK変調された信号を点灯させており,回転1度毎に異なるデータを送信している。また,回転式LED送信機の回転速度は受信機であるカメラの撮影速度以上の速さに設定する。
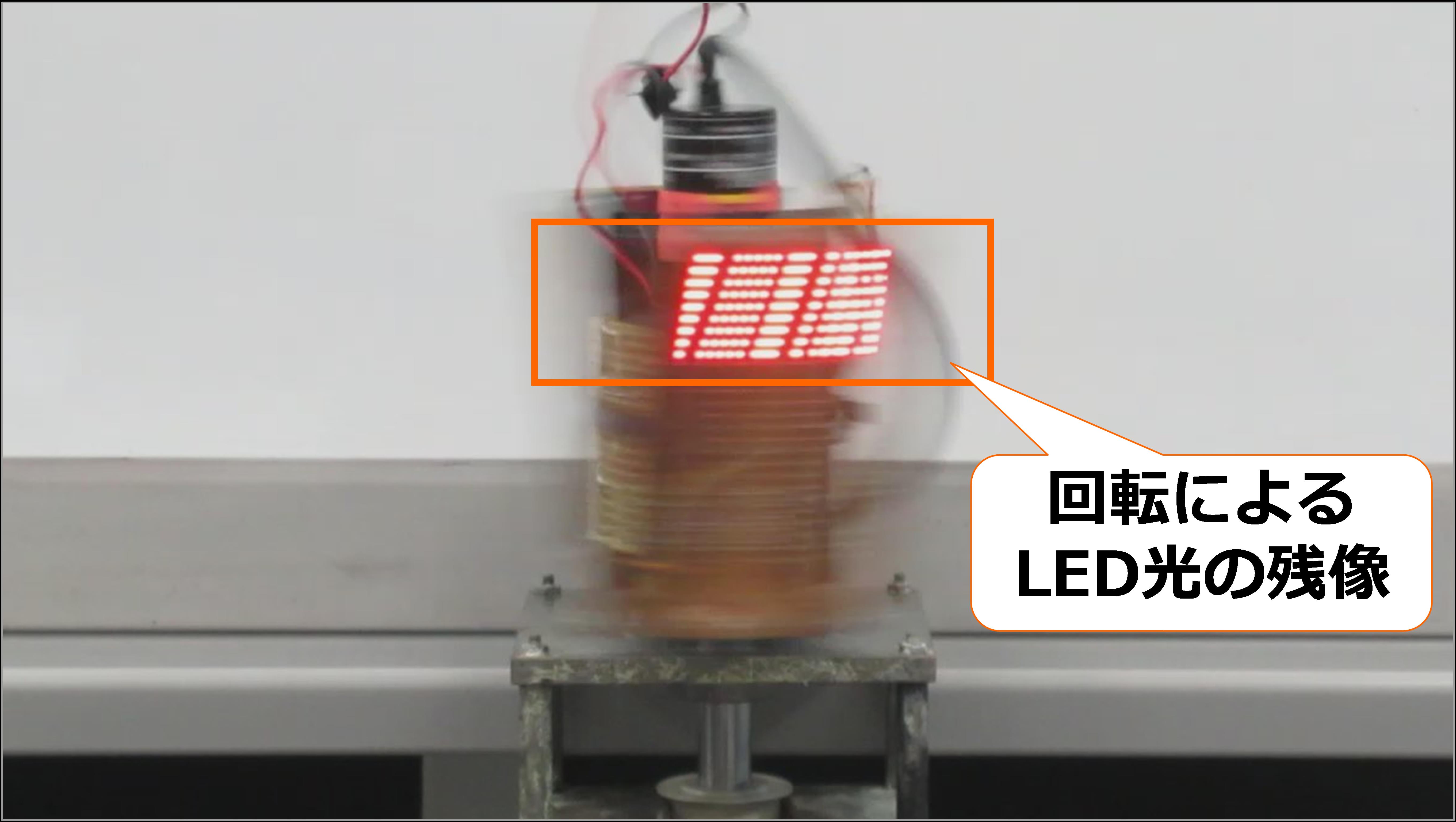
ここで,送信機の回転部側面がカメラレンズの正面になるように配置し,送信機が回転しながらLED点灯パタ ーンを切り替える様子をカメラが撮影する時を考える。送信機はカメラの撮影速度以上の速さで回転しているため,カメラがシャッターを開いている間,つまり,露光している間にレンズの前をLEDが点滅しながら移動していく。実際に回転している様子を撮影した画像を図2に示す。ご覧の通り,回転によって切り替わるLEDの点灯パターンが残像として捉えられている。
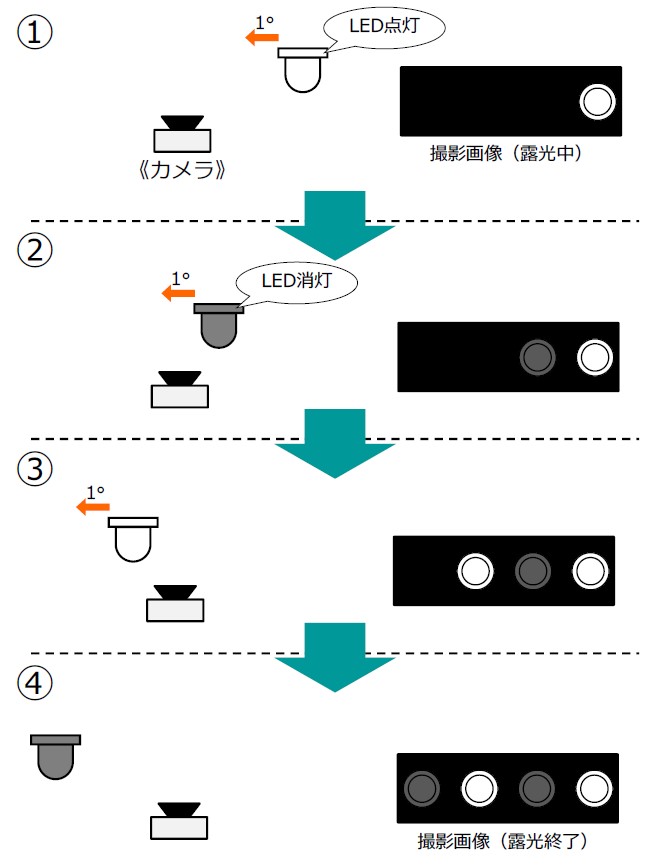
図3を用いて原理を説明する。今,1個のLEDが点灯と消灯を回転1度毎に繰り返しながら,シャッターが開いているカメラの前を横切る場面を考える。図3の①ではLEDが点灯しており,②では①の位置から1°移動したところでLEDが消灯している。この時,①から②に変わった間もカメラは露光を続けているため,①でのLED点灯状態と②での消灯状態の両方を1枚の画像に捉えられる。さらに,③,④と状態が変化する間も露光を続けると,最終的に1枚の画像で4回のLEDの変化を捉えられる。
つまり,1個のLEDの時間方向の点滅を画像の空間方向で捉えていると言える。先に述べた通り,本研究ではOOK変調された信号を点灯させている。図3の場合,4つのOOKされた信号を1枚の画像で捉えられていることになり,画像1枚当たりのデータ量は4 bitとなる。もし,このOOK変調された信号を画像1枚毎に捉えたとすると,全部で4枚の画像が必要となるため,図3の例では通信速度が単純に4倍となる。
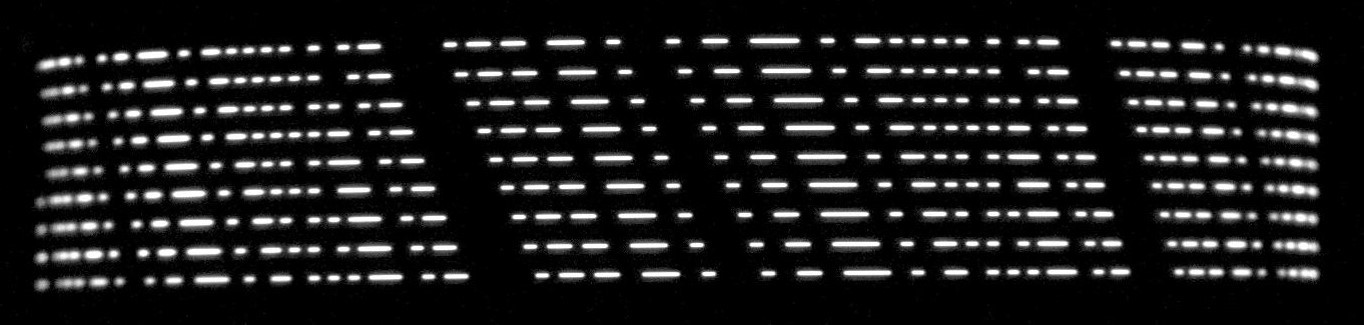
図4に回転式LED送信機の回転速度を1分間に300回転(300 rpm),カメラの撮影速度を5 fpsと設定して実験を行った時の撮影画像の例を示す。本研究では垂直軸を中心に送信機が回転するため,点灯パターン180度分がカメラによって捉えられる最大値である。この画像例ではその最大値の180度分の点灯パターンが残像として捉えられている。
この点灯パターンは全てOOK変調されたものであることから,1枚の画像で非常に多くの信号を受信していることになる。つまり,回転式LED送信機を用いることで通信速度が大幅に向上したことを意味する。