1. はじめに
レーザー走査型顕微鏡法は,集光したレーザー光のスポットを走査プローブとして試料を観察する光イメージング技術である。特に,蛍光染色された試料からの蛍光を検出光とする蛍光イメージング法では,試料内の特定の部位の局在や機能を可視化できることから,生命科学分野では必須の観察法である。
レーザー走査型顕微鏡法の大きな利点は,対物レンズの焦点と共役な位置でピンホールおよび検出器を設置する共焦点イメージングや,超短パルスレーザー光による蛍光分子の多光子励起過程を原理とした多光子励起イメージングによって,試料の深さ方向(光軸方向)に空間分解能を持つ光学断層像が得られることである。
これにより,試料の3次元画像を得ることが可能となる。しかしながら,実際に3次元像を得るためには,観察面を機械的に移動しながら2次元レーザー走査を逐次繰り返す必要があるため,観察深度の増大に伴って全体の観察時間が増大するという原理的な制約がある。
最近では,単一のレーザースポットによる2次元走査に加えて,スピニングディスクを用いた多点スポット走査1)や,ライン状の照明2),あるいはシート状照明3)などの様々な原理を用いた高速な画像取得法4)が開発されている。
ただし,これらは何れも観察試料における特定の2次元方向の画像取得の高速化を可能にするものであり,3次元像を構築するためには残りの軸(通常は深さ方向)に沿って観察面を移動する必要がある。つまり,最終的な画像取得速度は観察面の移動に律速される。
著者らは,レーザー走査型顕微鏡法における3次元画像取得速度を向上する独自の方法として,照明光(励起光)と検出光(蛍光)における振幅および位相の空間分布制御によって,観察面を移動することなく試料の3次元情報を取得する新たなイメージング方法の開発を進めてきた5)。
本稿では,その原理の概要と本イメージング法の応用可能性について紹介する。
2. イメージングの基本原理
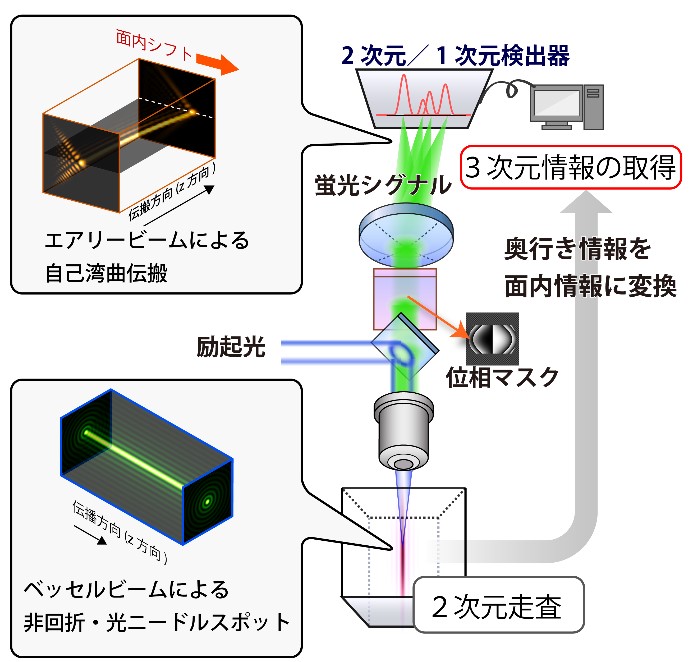
図1に本イメージング法の概念図を示す。本イメージング法では,試料面を走査する励起スポットを,後述するベッセルビーム6)と呼ばれる光ビームの特性を用いた長焦点深度のニードル状スポットとすることを原理とする。
焦点深度の長い励起スポットを用いたレーザー走査型の蛍光イメージングでは,その焦点深度の範囲内にある蛍光体を1回の2次元走査のみから一度に励起することが可能となる7~9)。しかしながら,得られる画像は各深さ位置での蛍光像が積算された投影像となり,深さ方向に対する情報は失われる。
最近は,このような長焦点深度の蛍光イメージングが,生物脳内において複雑なネ ットワークを形成する神経活動の高速可視化に有効であることが実証されているが10),各神経細胞の3次元的な配置や構造は事前に通常の2次元画像スタックなどにより記録する必要がある。
著者らは,このニードルスポットを用いた長焦点深度イメージングにおいて,蛍光信号に対する波面制御のみによって発光点の深さ位置を回復できないかと考えた。これを実現する原理がエアリービーム11)と呼ばれる光ビームの伝搬特性にある。エアリービームは入射平面波に対して3次関数で表される位相分布(キュービック位相)を与えることで得られる光ビームであり,伝搬にともなって光ビームが放物線の軌跡を描きながら面内方向に“曲がる”という極めて特異な性質(自己湾曲伝搬特性)を持つ11~13)。
このような曲がる性質を蛍光信号に付与すると,像面では発光点の深さ位置に応じて面内方向にシフトした位置に結像する。つまり,発光点の深さ情報が像面における面内方向の情報に変換することができる。これにより,長焦点深度のニードルスポット走査に同期して,2次元あるいは1次元の検出器によって像面での面内方向の強度分布を計測するだけで,発光点の深さ情報を一挙に読み取ることが可能となる。
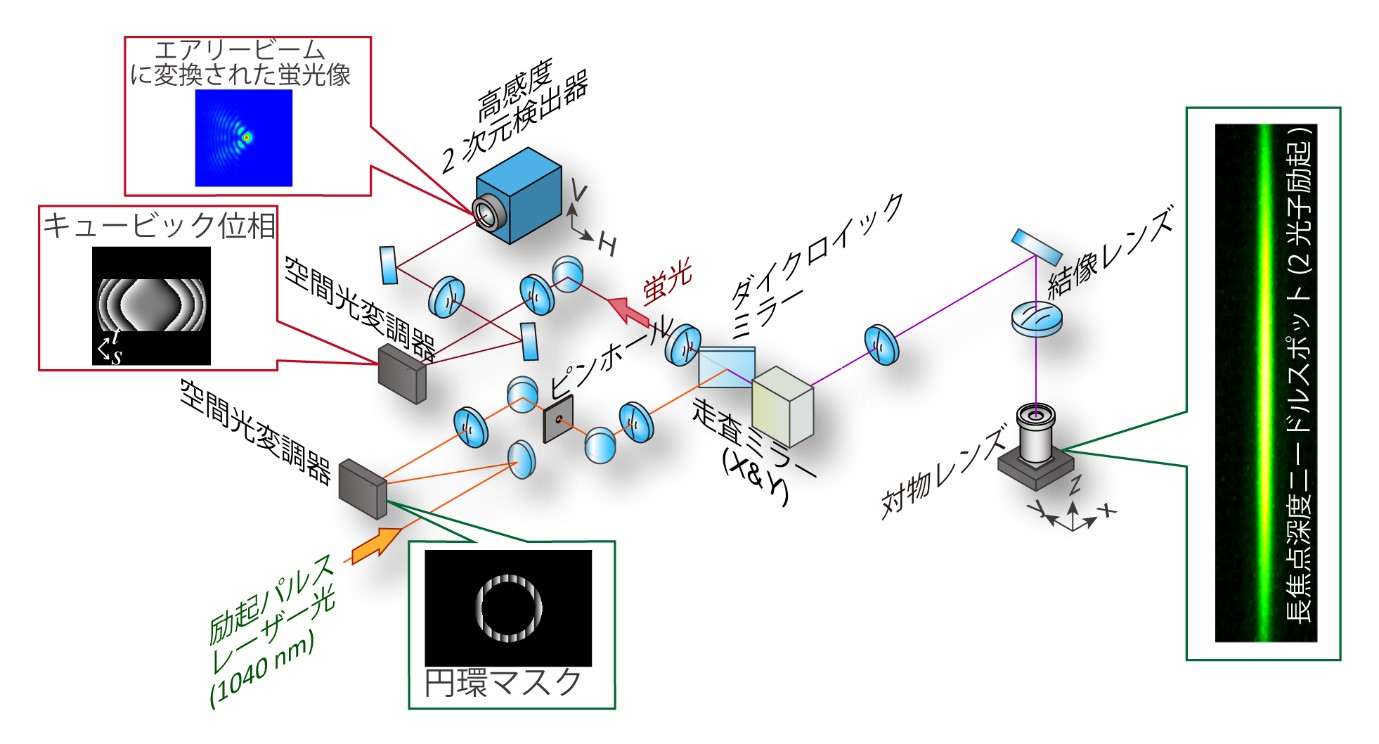
以上が本イメージング法の基本概念であり,本原理によって観察面を移動することなく試料の高速な3次元画像取得が実現する5)。実際にこの3次元イメージングの原理を実証するために構築した顕微鏡システム(図2)の概要について次に説明する。