1. はじめに
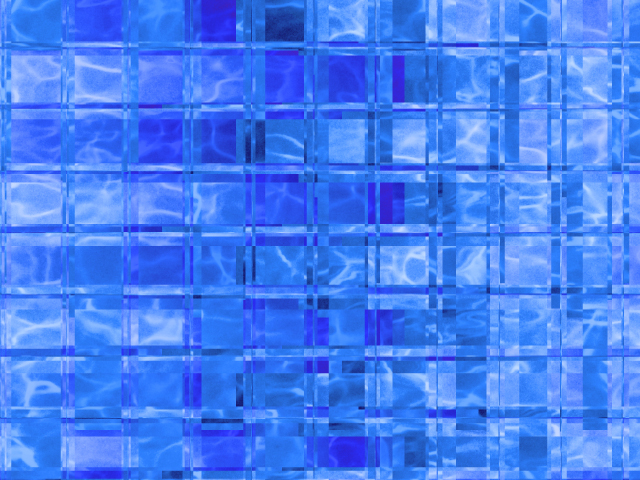
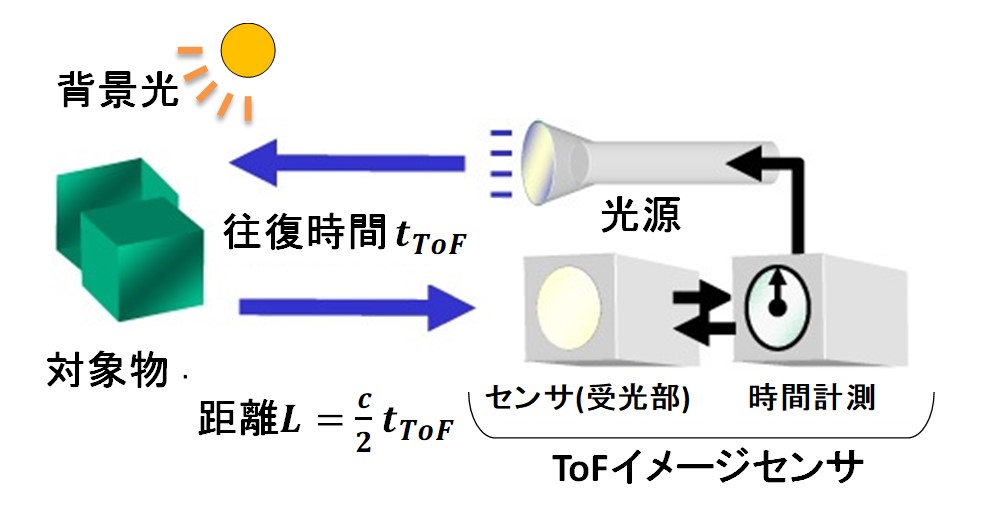
Time-of-Flight(TOF)距離イメージングは,光源から発せられた光が対象物で反射し,イメージセンサに返ってくるまでの飛行時間を計測することで,既知である光の速度を基に距離を算出する手法である(図1)。
近年,ジェスチャ認識による機器制御やAR/VRなどへの応用に向けて,TOF距離撮像デバイスへの期待が高まっている。特に,ロックイン画素を用いた間接TOF法に基づく距離撮像デバイスは,画素構成が簡単で多画素化に有利で,活発に開発が進められている1~10)。著者らは,単一フレーム内の背景光除去による動きにロバストなTOF距離撮像素子5)や広い測距レンジと高距離分解能化の両立するためのマルチタップ変調素子によるレンジシフト動作11, 12),高速電荷変調と多画素化に適したビルトイン電界型変調素子13),屋外長距離用途向けの高い量子効率を実現するSOI型4タップロックイン画素14)など,様々なTOF距離撮像素子の開発を進めてきた。
本稿では,計測分野を目的とした分野へ応用可能な100µmを超える極めて高い距離精度を実現するTOF距離撮像素子についての開発を紹介する。TOF距離イメージングは他の3次元計測にはない様々な特長があるが,距離精度は劣っているというのが一般的な認識である。光は1秒間に約300,000 km進む― 1nsの違いを計測できても,距離にして15cmの刻みが測定できたことにしかならないからである。我々は,このイメージを払拭し,新たなTOF距離撮像素子の応用を切り拓きたいと考えている。
2. TOF距離イメージセンサの原理と距離精度
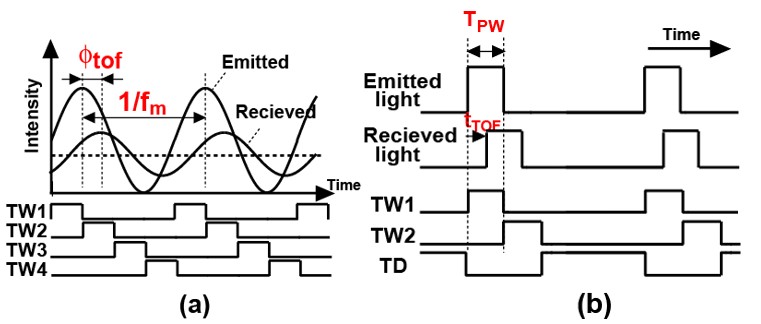
間接法によるTOF距離計測では,図2に示すように光源を正弦波などの連続波1, 4, 6 ~10)やパルス波2, 3, 11 ~14)に変調する。これを同期した複数の時間窓(TW1,TW2)で繰り返し信号を蓄積し,これらの出力から時間を推定する。例として図2(b)に示すパルス波変調の場合には, TW1,TW2により蓄積した信号をそれぞれN1,N2,とすると,飛行時間tTOFは
 (1)
(1)
と求めることができる。ここで,TPWは光源および時間窓のパルス幅である。TDは排出窓で,時間窓以外の時刻に到達した光を排出するためのものである。
三角測量に基づく他の3次元計測手法に比べて,TOF距離計測では光源と受光部との距離(ベースライン)が不要となる。したがって,(1)従来はベースラインで制限がかかるヘッドの小型化が可能,(2)光源と受光部の近接構成,あるいは同軸構成が可能でオクルージョン(影)が生じにくい,(3)測距範囲(ワーク)を電子的に制御可能,というような新たな付加価値を提供できる。
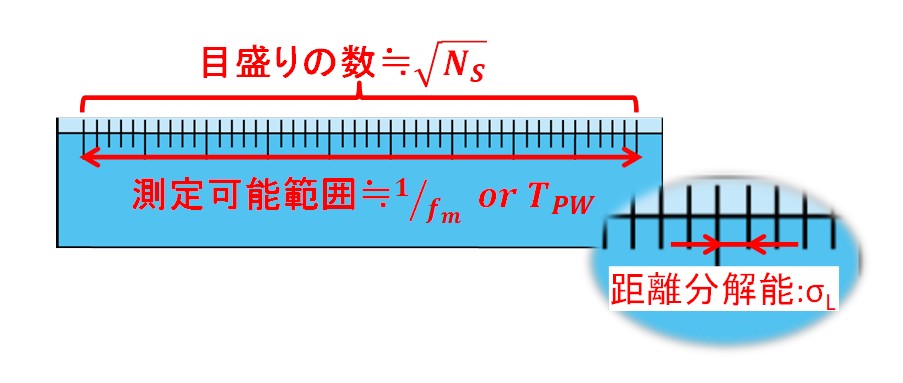
TOF距離イメージングで課題となるのは高い距離精度の実現である。パルス波変調の場合の距離分解能─ここでは距離精度と同義で1σ のばらつきと定義─は,変調周波数もしくは変調パルス幅および信号対雑音比SNRで距離分解能が決まる。信号電子の数が十分に多く,このショットノイズが支配的となっている場合には,次式として表すことができる。
 (2)
(2)
ここで,NSは信号電子数,LMAXは最大測距範囲を示しており,LMAX = c/2 TPWとなる。式(2)は,図3のようにものさしで考えれば解釈しやすい。測定可能範囲は変調パルス幅TPWで決まり,目盛りの数は信号電子数の平方根(√ NS )で決まる。したがって,信号電子数を一定に保ち,パルス幅を短くし測距範囲を減らせば高分解能化が実現できる。式(2)は厳密ではなく,実際には,SNRは背景光によるショットノイズ,センサの読み出しノイズが含まれる。
式(2)が示すように,信号電子数が一定であれば測距距離に依存せず距離精度を確保できる,というのも大きな特長の一つである。近年,自動運転などを目的としてLiDAR(Light detection and ranging)が活発に開発されているのも,この理由からである。実際にこの特長を活かすためには,返ってくるフォトン数の確保のため走査機構が必要となるが,計測用途においても有用となり得ると考えている。