1. はじめに

本稿では,我々が提案している協調ロボットの安全対策のためのToFセンサーを用いた近接覚センサーについて紹介する1〜3)。産業用ロボットは,自動車産業を中心に様々な分野で利用されている。これらの多くの産業用ロボットは安全性確保のために,ロボットと人の作業スペースが安全柵等で分けられている。このような中,モータ出力80 W以下のロボットもしくは適切な安全対策を施したロボットには安全柵の必要はなく4),ロボットと人が同じスペースで協調作業することが期待される。モータ出力80 W以下の協調ロボットでは,可搬質量を大きくすることが難しい課題がある。
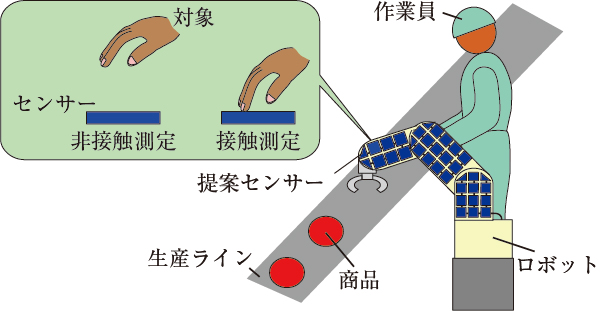
我々は,適切な安全対策に着目し,協調ロボットの安全性,作業性の向上ためのセンサーの研究を行っている。本研究の目標は,ロボット表面全体に取り付け可能な近接覚皮膚センサーの開発である。図1に本研究の最終的なイメージを示す。ロボット表面を近接覚センサーで覆い,ロボット表面の近接にて対象の検出を行うことにより安全性,作業性を向上させる。これによりロボットと人が同じスペースで安全に作業できることから,作業スペースを抑えることができ,作業の効率化も期待できる。更に接触を同じセンサーで検出することによりロボットの簡単な操作が可能となる。
これまでに我々は,協調ロボットの安全対策のセンサーとして,自己容量測定を用いた自己容量近接覚・触覚センサ7),ToF(Time-of-Flight)センサーを用いた近接覚皮膚センサ1),及びToF・静電容量複合センサ2, 3)等を提案した。提案した自己容量近接覚・触覚センサ7)は,近接測定及び接触測定に自己容量測定のみを利用することで測定システムが単純にできる。また,主に電極と弾性体で構成されることからセンサー構造が単純である。そのためセンサーの大きさ,形状を取り付け面に合わせ比較的自由に変更することができる。しかしながら自己静電容量測定における近接の測定値は,対象までの距離に加え,対象の電気特性,形状およびセンサーとの重なりに依存することから対象までの正確な距離を検出することが難しい課題があった。
そこで我々は,光技術を用い対象までの距離を検出可能なToFセンサーを複数用いた近接覚皮膚センサ1)を提案した。また,本手法を応用し,自己静電容量測定と組み合わせたToF・静電容量複合センサ2)を提案した。
2. ToFセンサーを用いた近接覚皮膚センサ1)
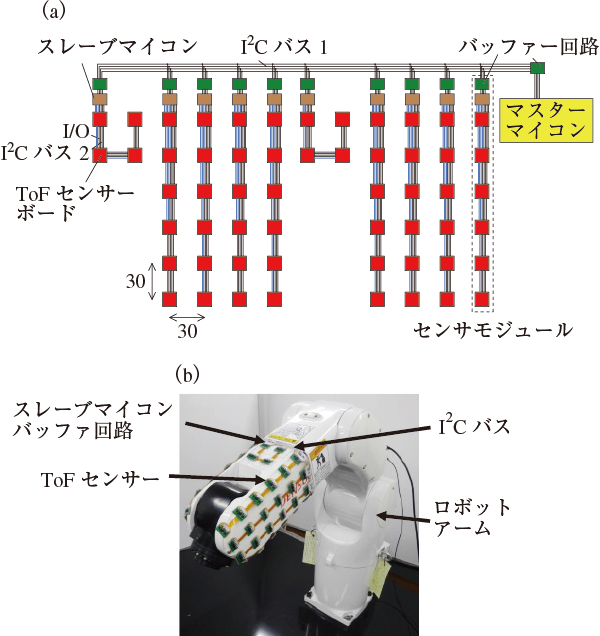
本技術は,協調ロボット表面を非接触における対象までの距離が検出可能なToFセンサーで覆うことを目的にしている。ToFセンサーは赤外線を照射し,対象による反射光をセンサーが受信するまでの時間を計測することにより対象までの距離を検出するものである。図2(a)に試作したセンサーシステムを示す1)。今回試作したセンサーは,ToFセンサーとしてVL6180X(STMicroelectronics社)を用いた。VL6180Xは,検出距離が150 mm検出モード,300 mm検出モード及び450 mm検出モードと設定できる。本システムでは,対象が遠い場合は300 mm検出モードを用い,対象が近づいた場合は150 mm検出モードに切り替える。
なお,予備実験より450 mm検出モードは検出可能距離が不安定であった。試作センサーは,複数のToFセンサーとスレーブマイコンを組み合わせ,センサモジュールとしており,センサモジュール間の接続及び増減が容易にできる。センサモジュールは,ロボットアーム(DENSO,VS-050)の表面に取り付けるためにスレーブマイコン1個とToFセンサー6個もしくは4個で構成される。なお,ToFセンサーの接続数は取り付け面に合わせ変更することができる。図2(b)にロボットアームに試作センサーを取り付けた様子を示す。スレーブマイコン-マスターマイコン間はI2Cバスで通信する。VL6180Xの赤外線の照射角は25 degであり,各ToFセンサーの間隔は30 mmとした。測定したデータはUSB経由でマスターマイコンからPCに送信した。今回試作したシステムでは,ToFセンサーの54個のデータを取得する時間は約34 msである。
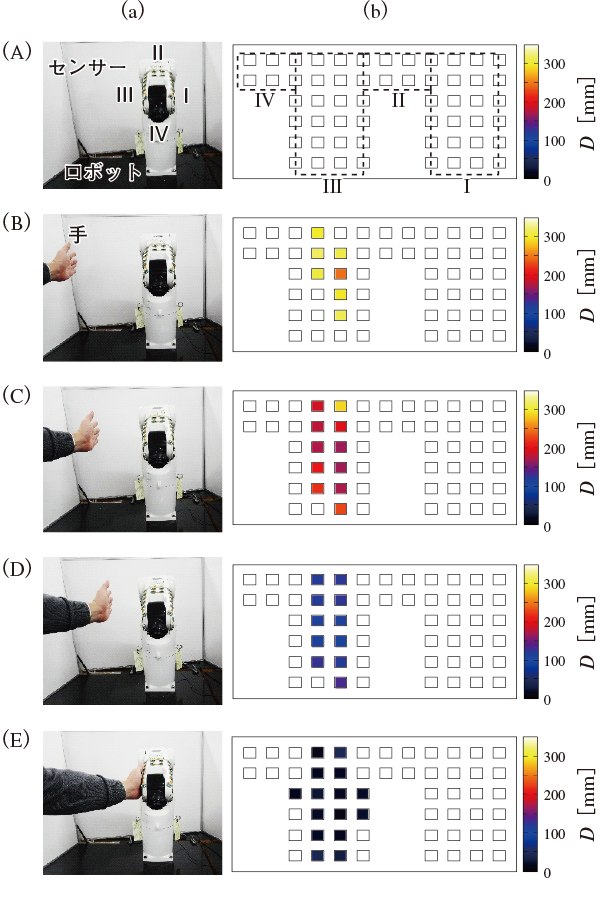
図3に示すように対象の近接測定を行った。図3(a)に実験の様子を,図3(b)に測定結果(距離:D)を示す。図3(A)は対象がない場合,図3(B),(C),(D)は手をセンサーに近づけた場合,図3(E)は手をセンサーに接触した場合をそれぞれ示す。図3(b)からわかるように対象が近づいた場合,センサーが対象までの距離と形状を検出できる。センサーが対象を非接触で検出した場合,ロボットを低速にすることや,停止することで対象との衝突を回避することができる1)。これらのことより,提案した近接覚皮膚センサは協調ロボットの安全対策の1つになり得ると考える。
しかしながら,ToFセンサーは赤外線の反射時間を計測していることから,対象までの距離が短い場合,測定精度が落ちる課題がある。