









慶應義塾大学理工学部システムデザイン工学科教授の大西公平氏の研究グループは、フォース トランシーバ(無線による携帯型力触覚通信機)の開発に世界で初めて成功した。このフォース トランシーバを用いると、送受信者による二者間の力触覚通信が可能になるばかりではなく、力を感じる遠隔操作も可能になってくる。
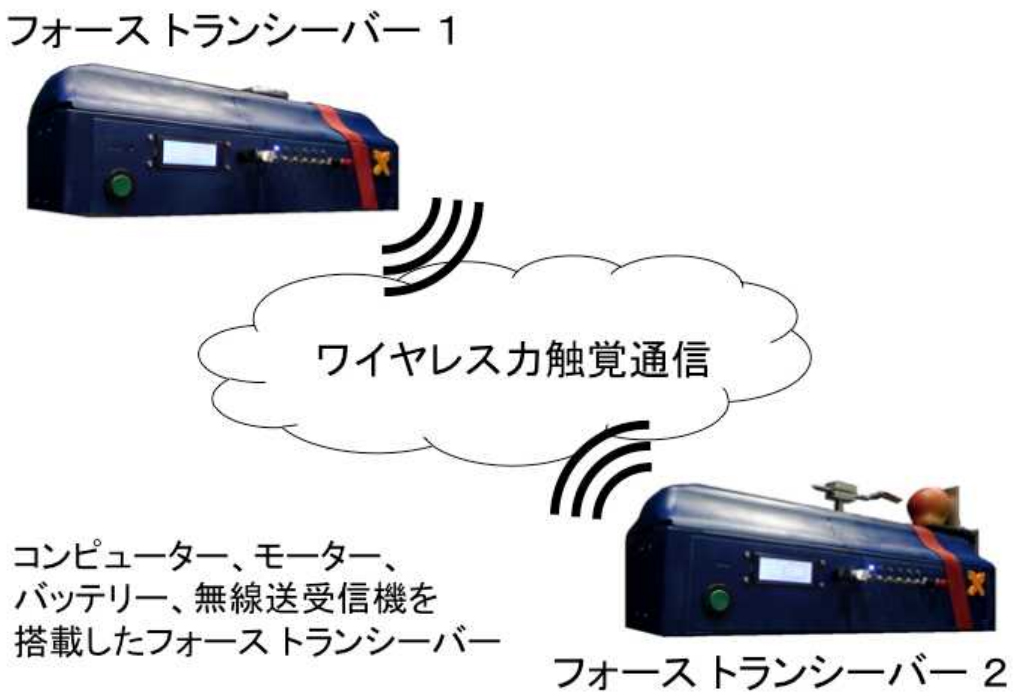
フォース トランシーバはコンピュータ、モータ、バッテリー、無線送受信機を完全内蔵しており、高い利便性と携帯性とを兼ね備えている。高機能コンピュータ制御により、動きの情報や力の情報をそのまま相手に伝えるばかりでなく、それらを増減して伝達することも可能。
図の例では、フォーストランシーバ2に取り付けたフォークでリンゴを突き刺すと、操作者はその感触をフォーストランシーバ1のレバーを通じて感じることができる。
例えば、遠隔操作において人間の動きを縮小して伝達し、触れた力を拡大して人間に伝達すれば、人間以上の繊細な動作が可能になる。また、送受信された力触覚情報は内蔵された記憶媒体(SDカード)に保存が可能である。
このような力触覚通信は、ラジオ、テレビ、携帯電話等の視・聴覚通信に続く第三のマルチメディアとして、幅広い分野への活用が可能であり、その開発が長い間待たれていたが、今回、世界で初めて実機の試作に成功した。
詳しくはこちら。
















