慶應義塾大学と米カリフォルニア大学は,自動運転車両のLiDARセンサーシステムにおける新たな脆弱性を発見した(ニュースリリース)。
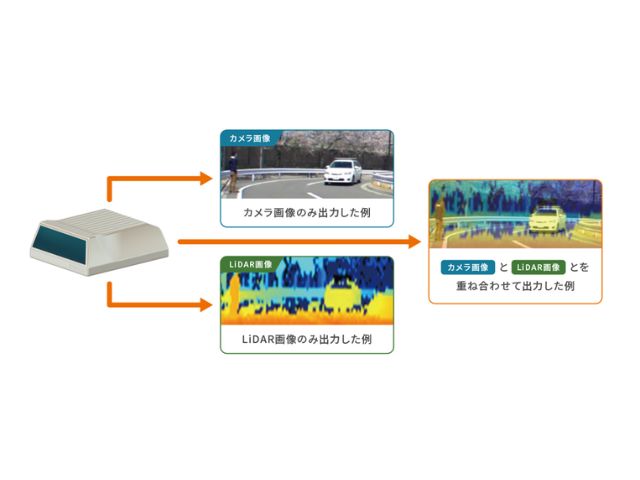
LiDARセンサーは,高精度な3D空間認識能力を持つことから,多くの自動運転システムに採用されている。しかし,このLiDARセンサーの安全性と信頼性が,自動運転車の普及における重要な課題となっている。
研究グループは,高速で移動する車両に対して長距離からLiDARセンサー攻撃するMVSシステムを開発した。このシステムは,IRカメラによるセンサー検出・追跡機構,高精度自動照準機構,そしてレーザー攻撃機構から構成されている。
IRカメラの導入により,LiDARセンサー自身が発するレーザー光を正確に追跡することが可能となり,110m以上離れた地点からでも車両に搭載された小型センサーを補足できるようになった。さらに,精密なサーボモーターと高度な制御アルゴリズムを組み合わせることで,移動する標的に対して0.1度以下の精度でレーザーを照射することに成功した。
実験による検証では,管理された実験用コースで実車にLiDARセンサーを搭載し,走行時の攻撃性能を評価した。60km/hで走行する車両に対して,110m離れた地点からレーザー攻撃を実施した結果,攻撃開始地点から20mの制動ブレーキ距離にわたって,平均96%の歩行者データを消失させることに成功した。
さらに,最新のLiDARセンサーに搭載されているPulse Fingerprinting防御機構を回避する新たな攻撃手法であるA-HFR攻撃を発見・実装した。従来の防御機構が想定していない高周波の攻撃により,防御機構を備えた最新のLiDARモデルに対しても,強力なデータ消失攻撃を成功させることができた。
また,オープンソースの自動運転システム「Autoware」を搭載したPixkit自動運転車両を使用し,管理された実験用コースで様々な攻撃シナリオを検証した。
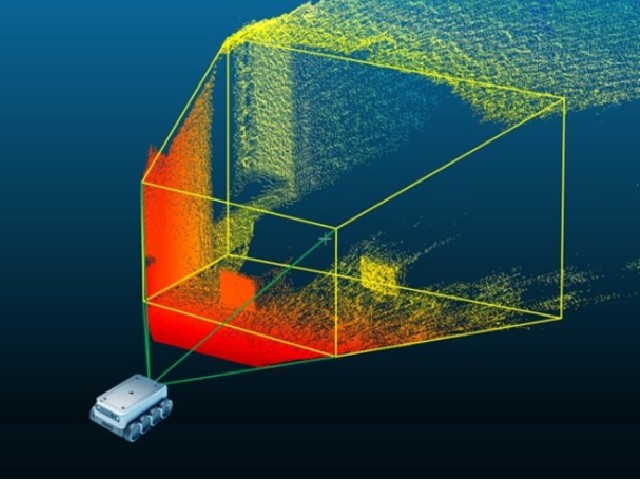
まず,LiDAR点群の消失攻撃では,前方の停止車両をLiDARデータから消去することで,自動運転車が障害物を認識できず衝突を誘発可能であることを確認した。また,虚偽オブジェクトの注入攻撃では,存在しない壁をLiDARデータに挿入することで,自動運転車にブレーキを誤作動させることが可能であることを実証した。
研究グループは,この研究成果は,自動運転車両のセンサーセキュリティの重要性を示すとともに,より強固な安全対策の開発につながる重要な知見を提供するものだとしている。