東京農工大学の研究グループは,緑藻の一種であるボルボックスの体細胞には周囲の明るさに順応可能な照度差検知機構が備わっていることを発見した(ニュースリリース)。
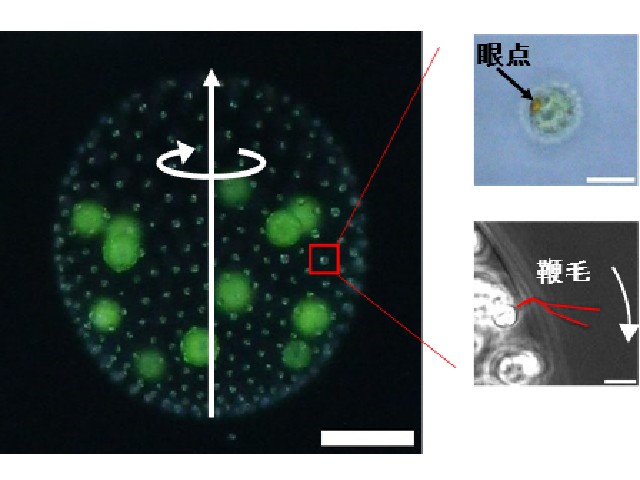
ボルボックスは池や水田などの淡水に生息する緑藻の一種であり,直径数百マイクロメートル程度の球形をしている。球面上に数千個の体細胞が配置されており,各体細胞には光センサーの役割を担う眼点と,駆動力を生み出す2本の鞭毛が備わっている。
数千本の鞭毛が水をかくことで,ボルボックス個体は自転しながら水中を泳ぐ。細胞内には光合成を行なうための葉緑体が存在し,個体は明るい方へ移動する正の走光性を示すことが知られている。
ボルボックスには細胞間の複雑な情報伝達機構は備わっておらず,個体の走光性は「暗から明の照度(明るさ)変化に対する鞭毛運動の一時停止」という個々の細胞のシンプルな応答により実現されている。さらに,ボルボックスは周囲の明るさに応じて走光性の感度を変えることができる。
しかし,この感度調節機構が体細胞に備わっている機構であるのか,細胞集合体として個体に現れる性質なのかは定かでなかった。
研究グループは,集団,個体,細胞レベルにおいて,照度変化に対する応答を観測した結果,ボルボックス個体を構成する体細胞には,変化前後の明るさの差(照度差)に対して反応し,周囲の明るさに対して感度を調節できる機構が備わっていることを発見した。
さらに,これらの差動型,順応型センサーとしての性能は,前方の細胞のほうが後方の細胞よりも高いことが分かった。これらの光センサーとしての性能の違いは,体細胞に備わる眼点の大きさと関係していると考えられるという。
前方の細胞の数は後方の細胞よりも少なく,前方に位置する感度の高い少数の細胞が舵取り役を担い,後方に位置する感度の低い多数の細胞が漕ぎ手役を担っていると考えられるとしている。
今回発見された位置に依存した細胞の性質の違いは,細胞の機能分化と多細胞化の関係や,細胞数に応じた生物の生存戦略という観点からも興味深い結果。研究グループは,単純な機構で高度な機能が創発するしくみは,マイクロロボットや自動制御システムの開発への応用が期待されるとしている。