 東芝は,車載カメラと,動きを検知する慣性センサーを用いて,自車両の動きを高精度に推定する「自車両の動き推定AI」と,様々な交通シーンで周辺車両の将来の動きを予測する「他車両の動き予測AI」を開発した(ニュースリリース)。
東芝は,車載カメラと,動きを検知する慣性センサーを用いて,自車両の動きを高精度に推定する「自車両の動き推定AI」と,様々な交通シーンで周辺車両の将来の動きを予測する「他車両の動き予測AI」を開発した(ニュースリリース)。
自動車の安全走行には,自車両の動きの正確な推定と,他車両の将来の動きを正確に予測する技術が不可欠となる。現在ADASにおいてはLiDARやGPS等のセンサーを用いた技術が開発されているが,高価であったり,周辺の建物等によっては衛星からの電波が届かず計測ができないといった課題がある。
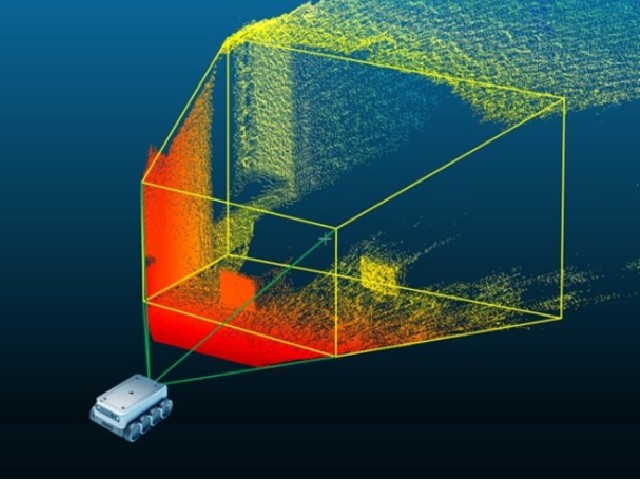
「自車両の動き推定AI」は,車載カメラ画像から周囲環境の3次元空間地図の生成と車両位置の推定を同時に行なう技術(SLAM)をベースに,加速度センサーや角速度センサーといった慣性センサー(IMU)を用いることで様々な風景に対応できる。
しかし,高速道路で車両の速度が一定でセンサーの値に変化がないと言った場合等,センサーのノイズのほうが有効な信号より大きくなってしまい,推定精度に悪影響を及ぼす問題があった。
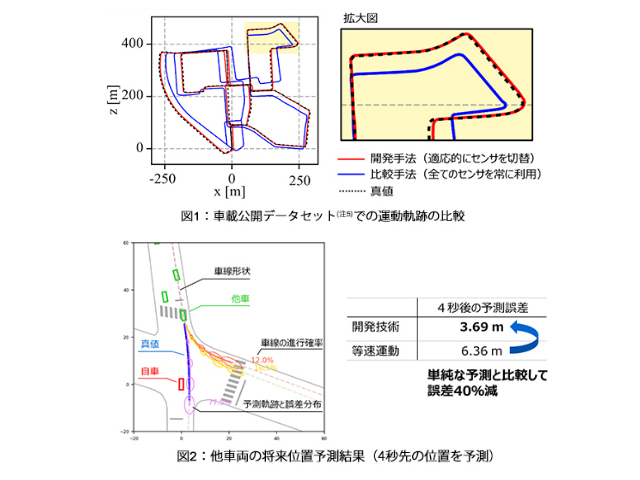
今回,車両の動きに応じて画像(カメラ),加速度センサー,角速度センサーごとのデータの有用性を各時刻で判定し,変化がある有効なセンサーだけを適宜組み合わせて車両の動きを推定する手法を開発した。
このAIは,自動車のように加減速が比較的少ない動き方から,ドローンのような加減速の大きい動き方まで対応する。公開されているデータセットを用いて検証したところ,カメラと慣性センサーから得られるデータをもとに推定する従来手法に比べて誤差を40%低減し,カメラのみを用いた場合との比較では誤差を82%低減して,真値の軌跡とほぼ一致する結果を確認した。
「他車両の動き予測AI」は様々な道路形状において有効となる。道路形状などを一般化した幾何学的な特徴をディープラーニングで学習することで,実際の道路の形状に依存しないAIが実現でき,様々な交通シーンが想定される一般道等においても膨大な数の予測AIモデルの作成が不要となる。
車線ごとの動きの予測と,将来走行する可能性の高い車線を予測のする2段階構成となっており,多様な道路形状に対応して高精度な予測を実現する。公開されているデータセットを用いた実験では,他車両の将来位置予測(4秒先の位置の予測)において,従来手法と比較して誤差を40%以上削減し,世界最高精度を達成したという。
同社は今後,今回開発した技術を公道など実際の環境で評価を行ない,2023年度の実用化を目指していくとしている。