 オムロンは,小型の画像センサーで,対象物の位置・姿勢を3次元で認識する業界最速の3D画像センシング技術を開発した(ニュースリリース)。
オムロンは,小型の画像センサーで,対象物の位置・姿勢を3次元で認識する業界最速の3D画像センシング技術を開発した(ニュースリリース)。
この技術とロボットを組み合わせることで,これまで人手に頼っていた,バラ積み状態の部品の組立工程を高速かつ正確に自動化することが可能となる。この技術を搭載した小型の3D画像センサーの商品化を2020年に予定している。
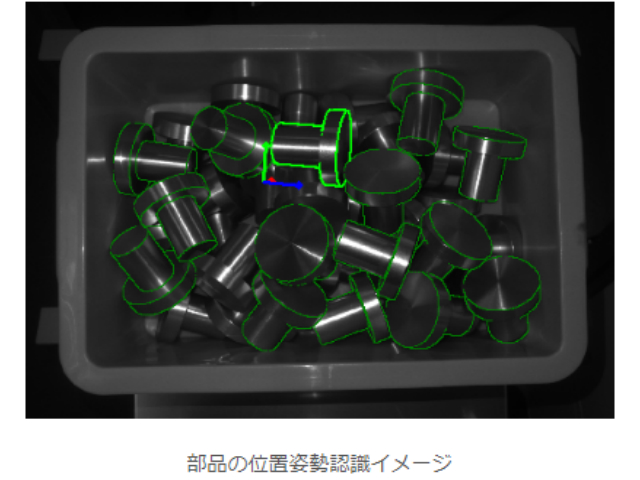
近年,製造業の人手不足や人件費の高騰が深刻化する中,人の経験や感覚を必須とし人に依存していた組立,検査,搬送工程などの自動化が急務となっている。しかし,組立工程においては,人手で実施されているバラ積み状態の部品のピッキング作業をロボットで自動化するには,ロボットの目となる,部品の位置や姿勢を即座に認識する高速な3D画像センシング技術が求められる。
このためには,構成する2つの技術である,3次元形状画像を生成する3D計測技術と,対象物の位置姿勢を認識する3D認識技術を高速化することが必要となる。
同社は,このニーズに対応すべく高速・高精度に対象物を3次元で認識でき,画像センサーを小型,軽量化することで,ロボットのハンド部分へ搭載できる3D画像センシング技術を開発した。
従来の3D計測技術の位相シフト方式では,10回以上の撮像が必要なため,計測に時間を要していたが,独自のパターン照明を用いて1回の撮像で対象物の3次元形状画像を生成する3D計測技術を開発した。また,3D認識技術においては,画像処理分野で培った高速2Dサーチ技術を3Dに拡張し,対象物の位置姿勢を高速に認識するアルゴリズムを開発した。
これらの技術により,ロボットのピッキング動作を妨げない約0.5秒での高速な部品認識が可能となった。さらに,独自のパターン照明によりカメラを小型化し,約500gに軽量化したことで,小型ロボットのハンド部分へ搭載可能となった。部品の設置状態に応じて3D画像センサーの視点を移動することができ,様々な位置姿勢の部品に対応する柔軟なピッキングを実現するとしている。