慶應義塾大学らは,産学連携体制で,軟性内視鏡とロボット技術を融合させた,軟性内視鏡手術システム(Flexible Endoscopic Surgical System: FESS)の非臨床試作モデルを完成させた(ニュースリリース)。
医療機器市場が拡大傾向にある中,成長率が高く市場規模も大きい治療機器のほとんどが海外製品となっている。そのため患者が最新機器を使用した治療をタイムリーに受けられない状況にある。
一方,市場は大幅な輸入超過となっている。このような状況を改善するため,研究グループは,日本が得意とする軟性内視鏡とロボット技術を融合させることで,小型で操作性がよく体にやさしい軟性内視鏡手術システムを開発した。
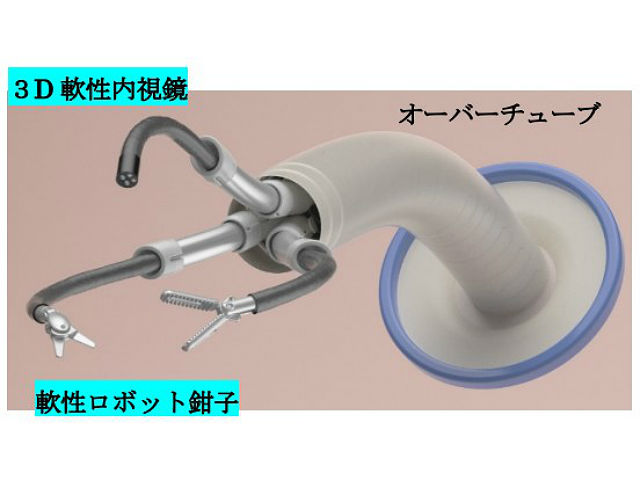
このシステムは,直径5mmの軟性ロボット処置具2本ないし3本と直径8mmの3Dカメラ1本,これらを体内に導入するための軟性オーバーチューブからなる手術動作部と,内視鏡と処置具を遠隔操作するための操作部から構成される。執刀する医師はコンソールのモニターで内視鏡画像を見ながら,直観的に精密な操作をすることができる。術式によっては,既存の汎用デバイスを併用することも可能となる。
このシステムは人が持ち運べる小型軽量のユニットで,ベッドサイドに設置したり,ベッドレールに取り付けることができ,ロボット手術専用手術室は不要。内視鏡に組み込まれた3Dカメラの近赤外蛍光観察機能は,可視光映像と近赤外蛍光映像を重ね合わせて表示させることができる。臓器表面の色調や形の情報に加えて,通常光では見えない脂肪に隠れた重要な臓器を確認しながら,手術を進めることが可能となる。
このシステムは体表の一つの小さな切開孔,または口や肛門からの挿管で,柔軟に曲がって体の奥や管腔内に到達することができ,繊細な操作ができる利点がある。このため従来では 体表を大きく切開せざるを得ない患部,または腹腔鏡手術が困難であった膵臓がんなどの患部に対し,より低侵襲で安全な手術ができる可能性がある。
研究グループは,将来的には,器具が臓器に触れた感じが医師の手に伝わる力触覚機能を追加し,安全性をより高める研究開発も進めていくとしている。