 日立GEニュークリア・エナジーと国際廃炉研究開発機構(IRID)は,東京電力福島第一原子力発電所の廃止措置に向け,原子炉格納容器(PCV)内を調査するため、新たに3次元的計測が可能な線量計や水中カメラを搭載した調査用ロボット「PMORPH(ピーモルフ)」を開発した(ニュースリリース)。
日立GEニュークリア・エナジーと国際廃炉研究開発機構(IRID)は,東京電力福島第一原子力発電所の廃止措置に向け,原子炉格納容器(PCV)内を調査するため、新たに3次元的計測が可能な線量計や水中カメラを搭載した調査用ロボット「PMORPH(ピーモルフ)」を開発した(ニュースリリース)。
福島第一原子力発電所1号機では,2016年度中に,燃料が溶け落ちていると見られるPCV内部の地下階調査(B2調査)が計画されており,PCV地下階のどのあたりに燃料デブリが多いかなどの地下階の状態を把握し,今後の燃料デブリ取り出しに向けた情報を収集することが求められている。
両者は2015年4月,遠隔操作で形状を屈曲させることのできる調査ロボット「形状変化型ロボット」を,直径10cm程度の狭いパイプを通し,障害物をよけながらPCV内に投入し,1階PCV内部調査(B1調査)を行なった。今回,B2調査に向け,さらに地下階部分を調査するための機能を追加搭載したロボットの開発を進めてきた。
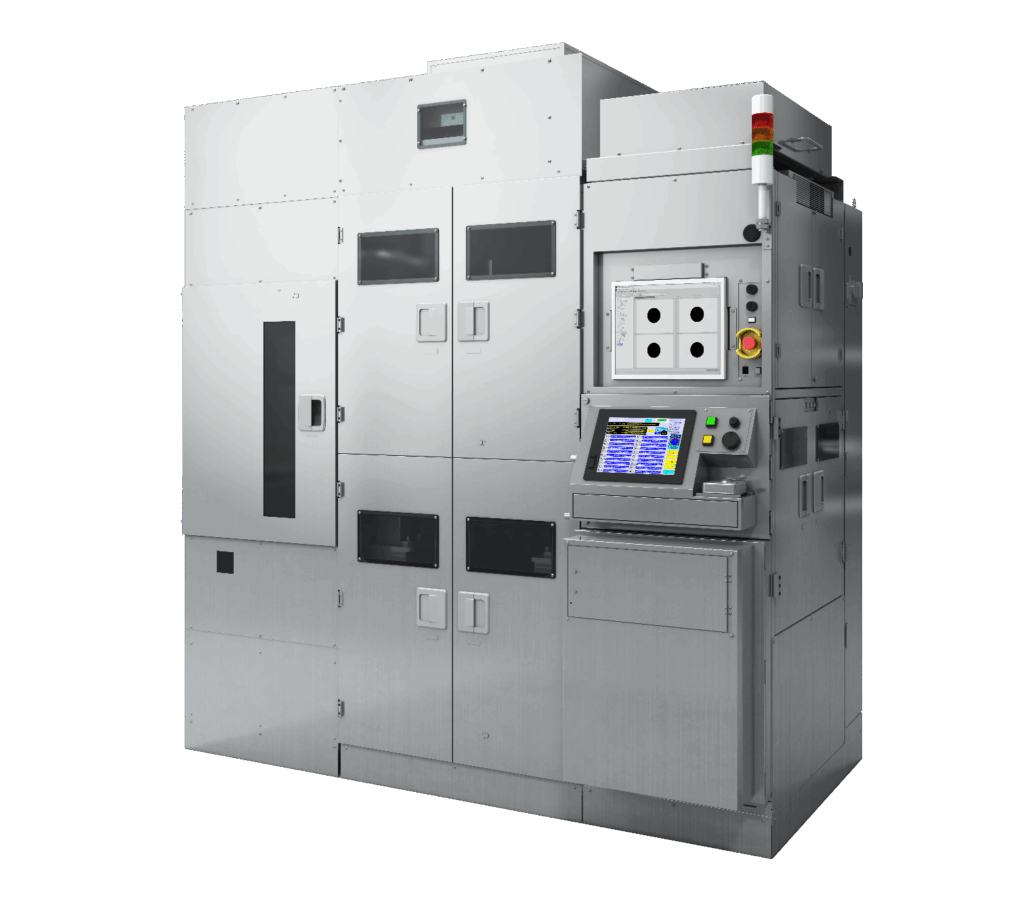
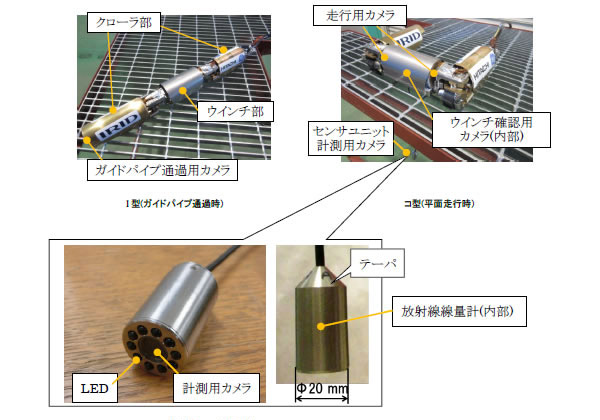
今回開発した「PMORPH(ピーモルフ)」は,新たに線量の3次元的計測や水中カメラによる撮影ができる機能を搭載している。具体的には,カメラによる目視と線量計による測定の両方で燃料デブリの広がり状態を判別するため,耐放射線性が高いカメラとLED,線量計を一体にしたセンサユニットを用いて地下の計測する。
調査装置には,グレーチング上の走行,センサーユニットの昇降に用いるためのカメラと合わせ,合計5台のカメラのほか,センサーユニットを繰返し昇降させるためのウインチを搭載している。
このロボットの「PMORPH(ピーモルフ)」という名は,「PCV」と昆虫の形態変化を意味する「Metamorphose(メタモルフォーゼ)」を合わせた造語で,このロボットの機能を示している。今回の調査ではPCV内部の構造物を避けるように形状を変化させながら1階グレーチングを走行し,5カ所のポイントで水中の燃料デブリの広がり状況を調べる予定。
日立GEとIRIDでは,PCV内部を模擬した試験体を用いてロボットの操作や動作確認を行ない,2016年度中に計画されている福島第一原子力発電所1号機での現場調査の成功に向け,取り組みを進めていく。