 海洋研究開発機構(JAMSTEC)の研究グループは,海洋鉱物資源のサンプリング調査をより効率的に行なうための「高効率海中作業システム」の海中試験に成功した(ニュースリリース)。
海洋研究開発機構(JAMSTEC)の研究グループは,海洋鉱物資源のサンプリング調査をより効率的に行なうための「高効率海中作業システム」の海中試験に成功した(ニュースリリース)。
この取り組みは,内閣府が進める戦略的イノベーション創造プログラム(SIP)の課題の一つである「次世代海洋資源調査技術(海のジパング計画)」において遠隔操作型無人機(Remotely operated vehicle:ROV)を用いた民間企業の海洋鉱物資源調査への参入を促進することを目的として進めているもので,日油技研工業,日産自動車及びトピー工業と共同で開発を進めている。
開発中の高効率海中作業システムは,目標地点における硬質岩石のコアを採取できるコアリングシステム,採取地点の地形に応じたきめ細かな位置・姿勢制御が可能なクローラーシステム,暗い海底面でも周囲の状況をオペレーターが視認可能とする全周囲画像表示システムから構成され,海底において大容量の電力ならびに油圧の供給能力と機動性を兼ね備える汎用ROVに装着して利用することができるもの。
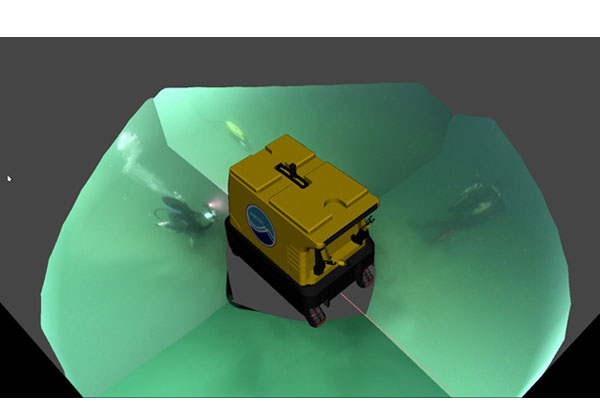
今回の高効率海中作業システムにおいては,全周囲画像表示システムとして,開発が進められているアラウンドビューモニター技術(クルマを真上から見ているかのような映像により周囲の状況を知ることで,駐車を容易に行うことが出来る運転支援技術)を世界で初めてROVに導入した。さらに,クローラーシステムとして,新たにフリッパー型全方向移動クローラーの開発に取り組んだ。
試作ユニットは水深3000mでの使用が可能で,ジャイロと水中高度計により海底面を探知しアラウンドビューモニターに反映することで,限定的ながらも海中を3Dで表現する。また,ROVが水中を浮遊して移動する場合でも,船上で操作するオペレーターが瞬時に海底やROVの状態を把握出来る事から,水中作業効率の大幅な改善が見込まれる。
このシステムは,ROVの姿勢を変えることなく前後左右に移動が可能な上に,姿勢角度も自由に変更できる機能を有する,世界で初めての移動機構になる。汎用ROVと組み合わせて,海底においてセンチメートル単位で精密に位置や姿勢を調節しながらのコア採取を可能にし,効率の良い海洋鉱物資源の調査を実現できる。
今回,高効率海中作業システムについて海中での総合作動試験を実施し,汎用ROVと組み合わせた海中試験で初めて,海底で周囲の状況を確認しながら,精密に位置や姿勢を調節して,海底に設置された模擬岩からコアの採取に成功し,技術の実用化の目処が立った。
今後は実海域での実証試験も含めた海中総合作動試験を実施し,高効率海中作業システムの性能向上を図ることで,実際にコバルトリッチクラスト等の海洋鉱物資源調査での活躍につながっていくことが期待されるとしている。