









カプセル内視鏡の実現により,小腸の内視鏡検査はハードルが大きく下がった。一方で,現在のカプセル内視鏡は消化器の蠕動(ぜんどう)運動によって受動的に体内を移動するため,カプセルを飲み込んでから排出されるまで約1日を要するほか,任意の方向への移動ができないため,胃のような広い空間の観察には適さず,撮影のアングルにも制約がある。
こうしたカプセル内視鏡の弱点を克服するために,自走型カプセル内視鏡の研究が多方面で行なわれている。中でも2011年,カプセル内視鏡にヒレを取り付け,磁力によって推進するタイプのカプセル内視鏡が大阪医科大学と龍谷大学によって発表され,注目を浴びた。
http://www.osaka-med.ac.jp/official/public/official-announcement/pdf/documents2011.06.22.pdf
しかし,魚のヒレのような推進装置をカプセル内視鏡に取り付けると,カプセルを嚥下しにくいだけでなく,体内で消化器を傷付ける恐れもある。これに対し九州工業大学 歳学院情報工学研究院 機械情報工学研究系助教の村上直氏は,カプセルの内部に推進装置を組み込み,滑らかな形状を保った自走式カプセルを開発した。
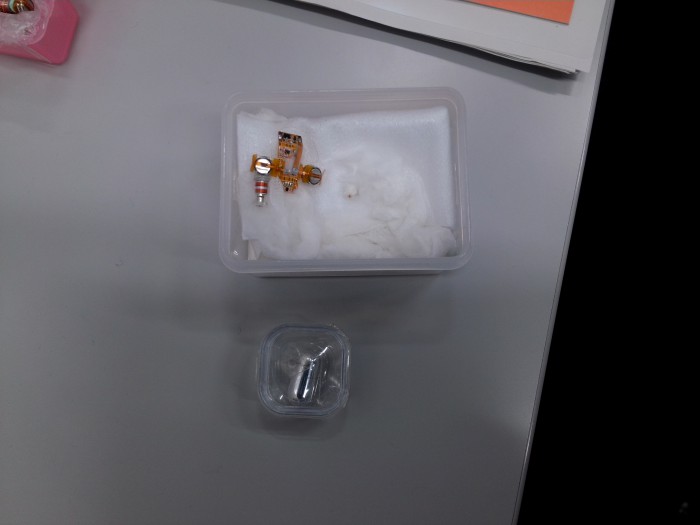
開発したカプセルはΦ11mm,長さ24.5mm(現行の小腸検査用カプセル内視鏡はΦ11mm,長さ26mm)。磁石を芯にしたコイルを内蔵し,これに交流電流を流して振動させる。行きたい方向にコイルが動く時により長く電圧をかけ,強く外殻にぶつけることで推進力を発生する仕組みだ。制御基板はこの推進機構を覆うようにしてフレキシブル基板上に配置,電池と共にカプセル内に収めることに成功した。

現在このカプセルはカメラや照明は搭載しておらず,前後に移動するだけだが,将来的には並行して研究を進めるMEMS技術による薬剤放出機構や,サンプル採取機構も搭載する計画。また,同様の機構を直交方向にもう一軸設けることで,左右にコントロールすることも検討しているという。
しかし,内視鏡とするためには,カメラや照明,映像の送信装置などを組み込むスペースの確保が必要となる。この問題を解決するにはワイヤレス給電がカギになるとして,村上氏は企業に技術協力を求めている。現在はボタン電池4つを電源とするが,自走するだけでも2時間程が精いっぱいいだという。この電池を不要にすると同時に,スペースを確保できるワイヤレス給電技術が,実用化の必須条件となる。
また現在,長さが12mmほどある推進機構だが,これもコイルの巻き方を工夫するなどして小型化を図りたいとしている。
この研究は,福岡県飯塚市,飯塚病院と協力した医工連携によって進められている。今後は国などの助成金を得ることで開発を加速し,2016年には臨床試験を行ない,2018年の製品化を目指す。
















