









1.研究背景
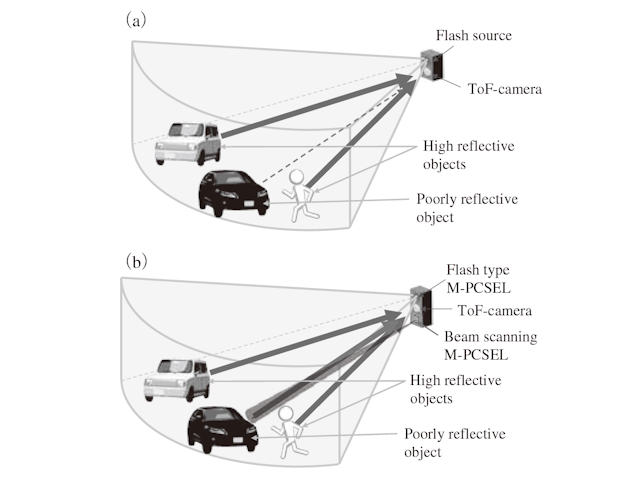
車の自動運転,ロボットの自動走行,ドローンの自動飛行等のスマートモビリティ分野において,物体の位置の把握,識別,追跡等を可能とするLight detection andranging(LiDAR)の重要性が増大している。LiDARの方式として,レーザーパルスを照射し,物体からの反射光が検出器に届くまでの時間(Time of Flight:ToF)により距離を測定するToF 方式は,比較的簡単な構成であるために広く注目されており,特に,非機械式で2 次元的にレーザー光を照射して距離計測を行う3 次元ToFLiDARへの関心が高まっている。非機械式3 次元LiDARの一種として,2次元の広い視野範囲をフラッシュ照射しつつ,測距機能を有するToF カメラを用いて計測を行う,フラッシュ型のLiDARシステムがあげられる。しかしながら,広い視野範囲を一括して照射することに起因して,照射パワー密度が低くなるため,図1(a)に示すように,視野内に低反射物体が存在する場合には,検出される光が弱くなり,測距が困難になるという根本的な課題を抱えている。
そこで,我々は,従来のフラッシュ型LiDARの課題を解決できるシステムとして,図1(b)のように,フラッシュ照射光源に加えてビーム走査光源を導入し,低反射物体が視野範囲内に存在する場合に,その物体のみをビーム走査光源を用いて十分なパワー密度でスポット照射することで測距を可能にする,新たな非機械式LiDARを提案した。さらに,ビーム走査光源およびフラッシュ照射光源として,レンズや回折光学素子,機械部品等の外部光学系無しで使用可能な,オンチップ変調フォトニック結晶レーザー(M-PCSEL)を活用し,小型の非機械式3 次元LiDARを実現した。
ここで, 小型3次元LiDARを実現する鍵となるM-PCSELとは,2 次元フォトニック結晶のライトラインの外に存在する特異点(M点)における大面積バンド端共振効果を用いてレーザー発振を得つつ,フォトニック結晶格子点に変調を与えることで,光をライトラインの内側の狙った方向へと出射させることが可能な,新たな半導体レーザー光源である。ビーム走査光源としては,任意の2 次元方向に狭い拡がり角のビームを出射可能なM-PCSELをアレイ状に並べたデバイスを構築した。本光源において,アレイを成す各素子を電気的にスイッチングすることで,狙いとする視野範囲内での非機械式ビーム走査を実現した。一方,フラッシュ光源としては,照射パターンの逆フーリエ変換に基づいて格子点に変調を与えたM-PCSELを使用し,単一チップの光源から,狙いとする広範囲への照射を実現した。そして,これらの光源と,その駆動のための小型回路,測距機能を有するToF カメラおよび制御系を一体化することで,名刺サイズ以下のフットプリントの小型非機械式3 次元LiDARを実現した。本小型LiDARシステムにおいて,従来のフラッシュ型LiDARでは測距が出来なかった低反射物体の測距を実証するとともに,低反射物体を自動的に検知して全自動追尾測距を行うことや,低反射物体の軌跡の計測等を行うことにも成功した。
本稿では,このような新たな3 次元LiDARの開発に関して,まず,その実現の鍵となるビーム走査型およびフラッシュ照射型のM-PCSELの詳細について述べる。続いて,開発した小型3 次元LiDARシステムについて述べ,低反射物体も含めた3 次元測距の実現,低反射物体の全自動追尾測距,さらに,低反射物体の軌跡の計測等を行った結果について紹介する。
【月刊OPTRONICS掲載記事 】続きを読みたい方は下記のリンクより月刊誌をご購入ください。
】続きを読みたい方は下記のリンクより月刊誌をご購入ください。
本号の購入はこちら

















