3. ToF・静電容量複合センサ2, 3)
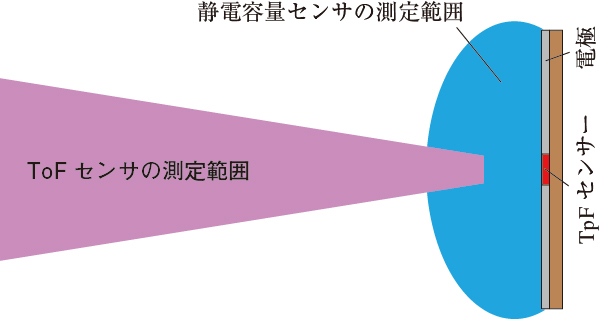
我々はToFセンサーの課題を解決する手法として,ToFセンサーと自己静電容量近接センサーを組み合わせたToF・静電容量複合センサを提案した2)。図4に提案手法の測定イメージを示す。ToFセンサーはZ軸方向における検出範囲が広く距離検出が可能であるが,近距離検出が不安定な問題がある。自己容量近接センサーは単電極に交流電圧を印加し,対象の接近による静電容量の変化を検出することで対象を検知するものである。自己容量近接センサーの測定値は,対象までの距離に加え対象の電気特性及び電極と対象の重なりに依存し,正確な距離検出及び長距離の検出が難しいが,近距離の検出感度は高い。そこでToFセンサーと自己容量近接センサーを組み合わせ,広範囲に高感度な近接測定を可能にする。
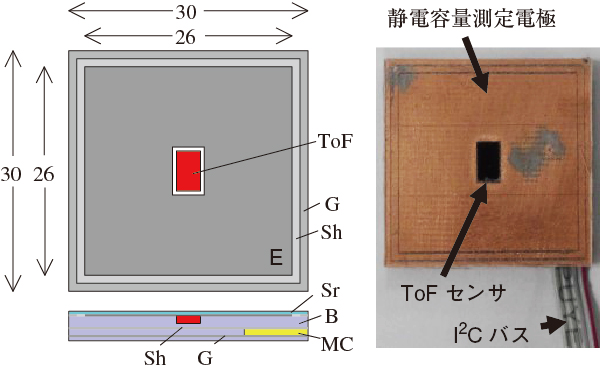
試作したToF・静電容量複合センサの概略図を図5に示す2)。最終的に協調ロボット表面全体をセンサーで覆うことを目的としているが,基礎研究として1素子のセンサーを試作した。センサーの大きさは30×30 mmであり,自己容量近接センサーの電極(E)の大きさは26×26 mmである。なお,センサー及び電極の大きさは,用途により変更することができる。自己静電容量測定には静電容量測定IC(Analog devices社,AD7147)を用い,AD7147を含む測定回路(MC)をセンサー背面に配置した。なお,AD7147は容量デジタル・コンバータ(CDC)であり,測定値はA/D変換したデジタル値(digit)で示す。センサーの中心にToFセンサー(VL6180X)を配置した。VL6180Xの大きさは,5×3 mmである。今回基礎研究としてVL6180Xは150 mm検出モードを用いた。AD7147及びVL6180Xは,I2Cバス経由でマイコンにより制御する。
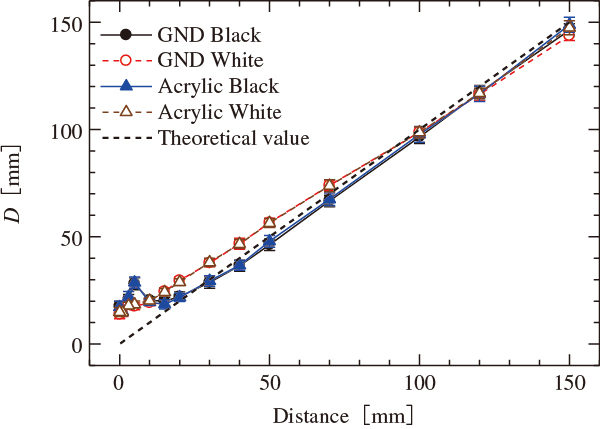
試作センサーの基礎特性を確認するため,試作センサーを平面に設置し,対象(30×30 mm)をロボットアームに取り付け実験を行った2)。対象とセンサーの距離を150 mmから0 mmまで調整した。対象として接地した導体及びアクリル平板に白い紙及び黒い紙を貼り付けた。なお,対象とセンサーは重なるように設定した。図6にToFセンサーの実験結果を示す。横軸に対象までの距離を,縦軸にToFセンサーの測定結果(距離:D)を示す。図6よりセンサーと対象までの距離に対し,Dが変化する。このことより対象の反射率(色)によらずToFセンサーで対象までの距離検出ができることがわかる。しかしながら10 mm以下では,距離を正確に測定することは難しい。
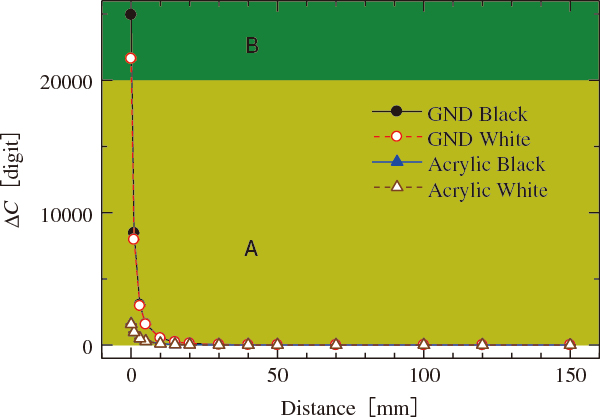
図7に自己容量近接センサーの実験結果を示す。横軸に対象までの距離を,縦軸に静電容量の変化量(ΔC)を示す。図7よりセンサーと対象までの距離に対し,ΔCが変化する。その変化は対象の電気特性により異なる。そのため対象が未知の場合,対象までの距離を検出することは難しい。しかしながら,対象が近づくにつれ,どの対象もΔCが変化することからΔCが一定以上変化した場合(図7A),非接触で対象を検知することができる。今回の実験では,接地した導体の場合,約40 mmから検出可能であり,アクリルの場合,約20 mmから検出可能であった。なお,人が自己容量近接センサーに近づいた場合,接地した導体に近い値を示す。本センサーは圧力等の接触の詳細は検出できないが,ΔCが大きく変化した場合(図7B)はタッチパネルのように人(指)が接触もしくは非常に近いことを検出することができると考える。
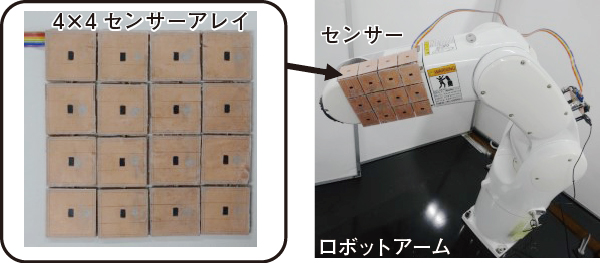
次に図8に示すように本センサーをベースに4×4のセンサーアレイを作製し,ロボットアームに取り付けた。今後,ロボットアームの形状に合わせたセンサーシステムの作製を行う予定である。図9に本センサーシステムにおけるロボット上の近接測定の結果を示す。ディスプレイ左がToFセンサーの結果であり,右が静電容量センサーの結果である。
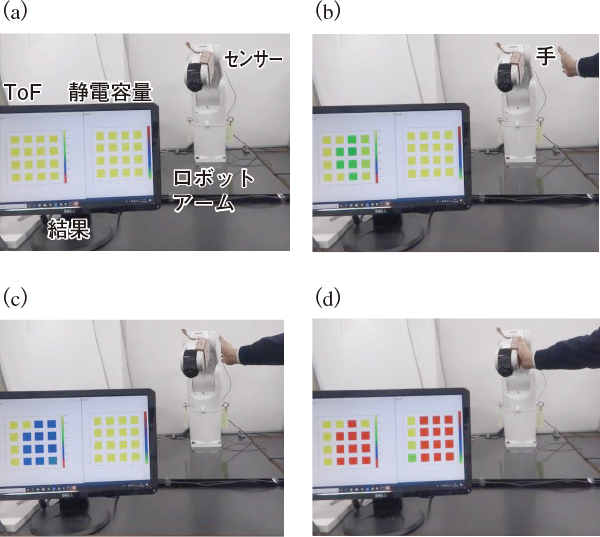
図9(a)に示すように対象が近くにない場合,センサーの値は変化しない。対象が近づいた場合ToFセンサーが対象を検出し(図9(b),(c)),接触付近では静電容量センサーも対象を検出する(図9(d))。このようにToF・静電容量複合センサにより広範囲に高感度な近接測定が可能になると考える。取得した近接情報によりロボットを低速にすることや,停止することで対象との衝突を回避することができる。更に接触情報によりロボットの簡単な操作ができる。このことから提案センサーがロボットの近接覚センサーとして有用であり,協調ロボットの安全対策の1つになり得ると考える。