 日立Astemoは,車両周辺環境の3Dセンシング結果を活用して,狭路などでも安全かつスムーズに,対向車と協調してすれ違うことができる自動運転技術を開発した(ニュースリリース)。
日立Astemoは,車両周辺環境の3Dセンシング結果を活用して,狭路などでも安全かつスムーズに,対向車と協調してすれ違うことができる自動運転技術を開発した(ニュースリリース)。
一般道における自動運転の実用化には,歩行者等の移動体による複雑な挙動や物陰からの飛び出し等のリスクを予測して事前に危険を回避したり,自動運転化されていない車両と混在した環境でもスムーズに走行できるよう,LiDARやステレオカメラなどの3Dセンシング情報に基づいた安全な走行軌道計画と車両走行制御が求められる。
これまで同社は,一般道での自動運転において,歩行者等の行動変化を予測し,安全かつ自然な減速を行なうことで,衝突を防止する基本技術に加え,人間が行なう運転のように,他の移動体の挙動や物陰からの飛び出し等,潜在的に衝突リスクの高い領域を予測し,予めリスクを回避できる速度や走行軌道で走行する危険予知・回避運転の技術を開発してきた。
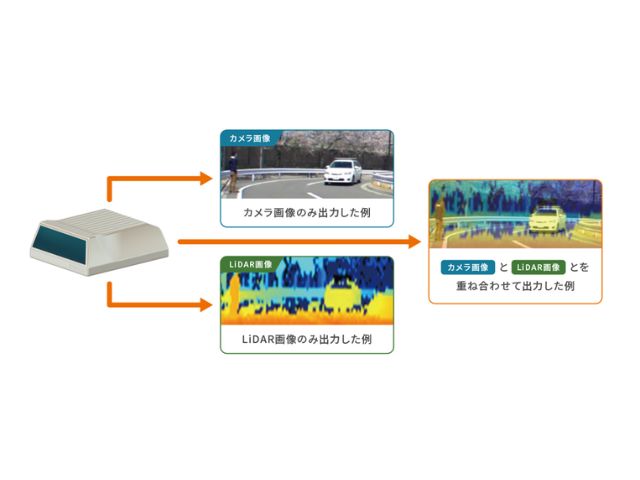
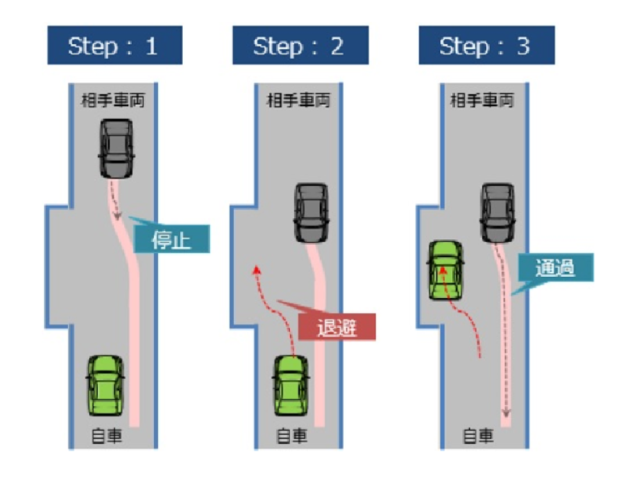
今回同社は,LiDARなどによるセンシングで得た三次元情報を統合し,車両周辺の走行環境を立体的に認識するとともに,検知したフリースペースや対向車両の挙動から進行意図を理解して経路予測を行なうことにより,対向車両と協調した,狭路でのスムーズなすれ違い自動運転を可能とする技術を開発した。
また将来的には,2023年3月から販売されている,汎用性を高めた高精度な新型ステレオカメラとの連携を視野に入れているとする。このステレオカメラは,遠方検知と広い画角を両立させるだけでなく,予め機械学習の手法で識別パターンを記憶させることで,高い精度で歩行者や自転車を検知し測距を可能とし,特に交差点右左折時の衝突防止に貢献するというもの。
さらに,同社が保有するAI技術や認識技術を生かすことで,コスト競争力のある電子制御ユニット上で,高度な画像認知や車両制御を可能とするソフトウェア処理を実現しており,新型ステレオカメラと連携させることで,狭路での協調行動を可能とする自動運転技術のコスト競争力を高めるとしている。