理化学研究所(理研),早稲田大学,シンガポール南洋理工大学,福井工業大学は,光エネルギーで再充電可能な電源ユニットを含む電子部品を搭載したサイボーグ昆虫を開発した(ニュースリリース)。
理化学研究所(理研),早稲田大学,シンガポール南洋理工大学,福井工業大学は,光エネルギーで再充電可能な電源ユニットを含む電子部品を搭載したサイボーグ昆虫を開発した(ニュースリリース)。
都市型捜索救助,環境モニタリング,危険地域の検査などの用途に,行動制御のための小さな集積回路を備えたサイボーグ昆虫が提案されている。サイボーグ昆虫の移動を無線で長時間制御し,環境データを取得するには,10mW以上を生成できる環境発電装置が必要となるが,昆虫の運動能力を保ったままこれを取り付けるのは困難だった。
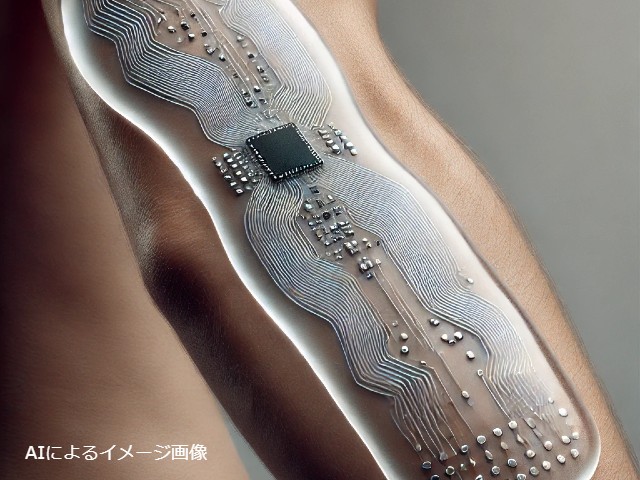
研究では,体長約6cmのマダガスカルゴキブリの背側に電子デバイスを取り付けた。無線移動制御モジュールとリチウムポリマー電池は柔らかいバックパックを介して,昆虫の胸部背側の曲面に沿って取り付けた。
構造の工夫により,昆虫の個体間の形状の違いによらず,曲面に完全にフィットして硬い電子デバイスを安定的に実装でき,繁殖環境において1カ月後でも維持されたという。
また,ポリマーフィルム(フィルム)上に作製された厚さ4μmの超薄型有機太陽電池モジュールは,腹部の動きの自由度を確保するため,接着剤領域と非接着剤領域を交互に配置する「飛び石構造」で昆虫の腹部背側へ貼り付け,十分に薄いフィルムと飛び石構造の組み合わせが昆虫の運動性を保持することを示した。
次に,超薄型有機太陽電池モジュールの出力を調べたところ,昆虫腹部の曲面形状の有効面積を最大化することで,最大17.2mWの高出力を実現できることが分かった。モジュールの有効面積は3.96cm2であり,これは腹部面積に対する開口率51%に相当する。超薄型太陽電池の有効面積当たりの重量は約5g/m2であり,曲面上での重量当たりの電力は8.69W/gに相当する。
最後に,生きたサイボーグ昆虫を用いて,充電と無線移動制御を実際に検証した。バッテリーを完全に放電し,疑似太陽光をサイボーグ昆虫上の有機太陽電池モジュールに30分間照射した後,無線受信で約2分間にわたって昆虫尾葉に接続した刺激電極へ,右方向への移動制御を複数回試行し,制御が繰り返し成功したことを確認した。
この研究で提案した飛び石構造で超薄型の電子素子を取り付ける戦略は,他の昆虫種にも適用可能。研究グループはこの成果によって,昆虫の寿命が続く限り,電池切れの心配なく長時間かつ長距離における活動が可能となり,サイボーグ昆虫の用途が拡大すると期待できるとしている。