 ソフトバンク(SB)と東京海洋大学は,水中の2台の遠隔操作ロボット(ROV)に光無線通信経由で別々の指示を同時に与え,それぞれをリアルタイムに制御する実証実験に成功した(ニュースリリース)。
ソフトバンク(SB)と東京海洋大学は,水中の2台の遠隔操作ロボット(ROV)に光無線通信経由で別々の指示を同時に与え,それぞれをリアルタイムに制御する実証実験に成功した(ニュースリリース)。
水中を透過する可視光を使用した光無線通信技術に関する研究が各国で進められてる。光は電波よりも直進性が高いため,通信を確立・維持するためには送信機の光を受信機が常
に受信できるように,常にお互いを追尾し合って,位置や向きを調整し続けるトラッキング技術が最も重要な要素の一つになる。
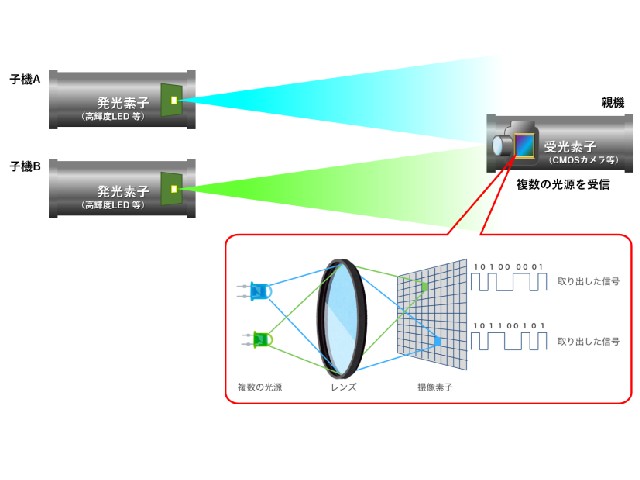
今回研究グループは,通信対象を捕捉・追尾する際に使用するトラッキング用カメラに,通信対象が発する光の明滅から信号を取り出す機能(OCC: Optical Camera Communication)を持たせることで,従来よりも広い画角で複数の光信号を自律的に捕捉・追尾可能な受信機を開発した。
さらに,送信側もレーザー光よりもビーム幅が広い拡散光を発する光源を採用し,トラッキング用カメラで捕捉しやすくすることで,同時に複数の通信対象を捕捉・追尾して,1対多接続の通信を実現する手法を新たに開発した。
この研究では,画像処理技術や精密制御技術を駆使することで水平方向に約±90 度,垂直方向に約±90度の自律型トラッキング性能を持ち,1対多接続の全二重通信が可能な水中光無線通信機を新たに3台開発し,実験水槽で実証実験を行なった。
実験では,水槽の水深約1.5mに3台の通信機(親機1台と子機2台)を設置し,各子機に接続されたROVを同時かつ別々に,陸上のパソコンからリアルタイムに操作する実証実験を行なった。
その結果,各子機がそれぞれ移動している状態でも,3台がお互いを捕捉・追尾して光無線通信を行ない,さらに各子機に接続されたROV2台を親機に接続されたパソコンからリアルタイムで別々に遠隔操作する実証実験に成功した。
今回OCC技術により,従来の光無線通信では実現できなかった広範囲に点在する複数台の通信対象を同時に制御することができた。また,各子機はROVと分離・独立した構成のため,子機が親機との通信を維持するために姿勢・移動制御を行なっても,ROVの運動に及ぼす影響が極めて少なく,安定した通信の維持とROVによる作業の自由度の両立を可能にした。
研究グループは,このトラッキング技術によって実用的な水中(海中)無線通信ネットワーク網の構築が可能になり,海洋産業の効率化や新産業の創出などに大きな経済効果が期待されるとしている。