 岡山大学はと同山大学発ベンチャー,ビジュアルサーボは,実時間複眼3次元空間認識をコンピュータに搭載し,ステレオビジョンカメラと組み合わせることで,任意対象物の位置姿勢をリアルタイムに計測できるシステムの開発に成功し。計測装置を商品化した(ニュースリリース)。
岡山大学はと同山大学発ベンチャー,ビジュアルサーボは,実時間複眼3次元空間認識をコンピュータに搭載し,ステレオビジョンカメラと組み合わせることで,任意対象物の位置姿勢をリアルタイムに計測できるシステムの開発に成功し。計測装置を商品化した(ニュースリリース)。
人間や動物は左右の複眼に映っているいかなる対象物であっても目測で距離や平面の姿勢を把握できる。
このような任意対象物に対する位置姿勢計測能力は未知環境下で働くロボットにとって重要であり不可欠な機能であるにも拘わらず,工学的に実現する方法は確立されていない。研究グループは,空間認識を用いた水中ロボットのビジュアルサーボを用いてドッキングに成功しており,ステレオビジョン空間計測の有効性の実証研究を続けてきた。
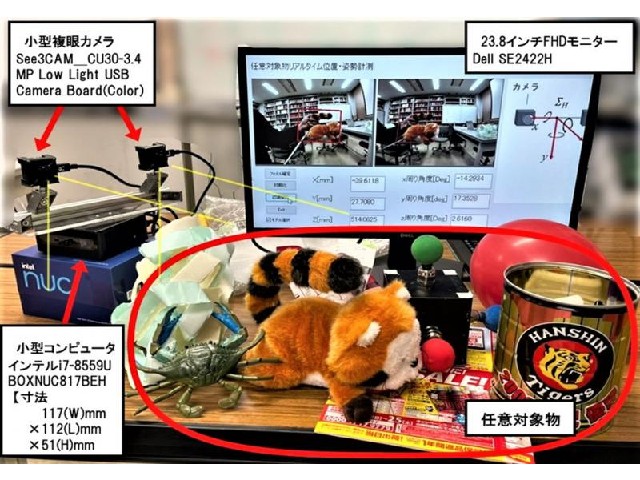
任意対象物の位置姿勢の計測方法は,ステレオビジョンの2台のカメラ映像の視差情報とAI技術を組み合わせることで構成される。このため高速かつ正確な計測を行なうことができるという。
実用化されている他の空間計測方法としては赤外線を用いた方法が存在し一般的だが,水中では赤外線の減衰が,気中屋外では太陽光中の赤外線が外乱となるため,これらの環境では機能しない。
一方,提案手法は可視光のみを用いているため水中・屋外・屋内でも使用できる。この手法を用いた位置姿勢制御は,原発炉心での放射能水中遮蔽下の廃炉作業においても溶融炉心内部の空間計測装置として使用可能だと考えられるとする。
この技術の空間計測を用いると未知環境での空間計測が可能なことから,上記の①原子炉廃炉水中作業中の環境形状計測のほか,②深海中の未確認生物の発見捕獲ならびに追従トラッキング制御による生態観察,③泳ぐ魚の寸法計測(水産:栽培漁業),成長管理による給餌量制御,出荷時期推定など,④マンガン塊などの深海底資源探査・回収,⑤機雷位置姿勢計測による撤去作業補助などへの利用が期待されるという。
産業界では単眼ロボットの利用が進んでいるが,動物のような複眼ロボットは普及していない。研究グループは,動物の空間認識能力や知能を持つロボットや計測装置を研究開発し,社会に貢献したいとしている。