 農業・食品産業技術総合研究機構(農研機構)は,予測された位置に高出力レーザーを照射するなど,害虫を駆除する新しい害虫防除システムの開発への貢献が期待される,害虫の飛翔位置を予測できる方法を開発した(ニュースリリース)。
農業・食品産業技術総合研究機構(農研機構)は,予測された位置に高出力レーザーを照射するなど,害虫を駆除する新しい害虫防除システムの開発への貢献が期待される,害虫の飛翔位置を予測できる方法を開発した(ニュースリリース)。
温暖化・乾燥化や病害虫の突発的大発生による穀物生産の大幅低下が起こっている中,世界の食料総生産の15.6%が害虫による損失を受けているとの報告もあり,害虫防除は食料の安定的な生産のための重要な課題となっている。
化学農薬に代わる防除技術として,ムーンショット型農林水産研究開発事業「害虫被害ゼロコンソーシアム(先端的な物理手法と未利用の生物機能を駆使した害虫被害ゼロ農業の実現)」では,レーザー狙撃による物理的防除方法を開発している。これは飛翔中の害虫を検知・追尾し,レーザー光によって狙撃する技術であり,化学農薬のように効果の低下や,環境への負荷の心配がないことが期待される。
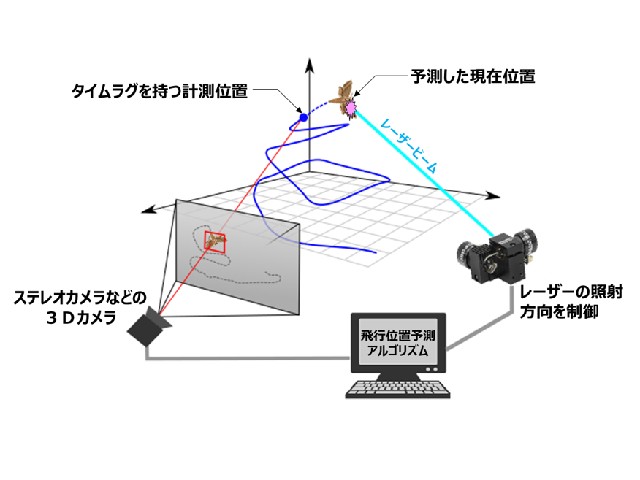
しかし,害虫を検知してからレーザーで狙撃するまでの間には0.03秒程度のタイムラグが生じ,その間にも害虫は移動し続けるため,検知した害虫の位置に向けてレーザーで狙撃しても害虫に命中させることができないという課題があった。
そこで研究グループは,レーザーでピンポイントに狙い撃ちするため,まず,3次元空間中を不規則に飛翔するハスモンヨトウをステレオカメラで撮影した。飛翔速度が秒速1~2mほどだったので,1秒間に55回のペースで撮影し,その3次元飛行軌跡を計測した。
撮影はハスモンヨトウの行動が活発になる夜間を模した暗闇環境で行なった。ステレオカメラの画像には,壁や柱などのほか,暗闇環境で撮影するため,画像中にノイズが含まれることがある。これらをリアルタイムで除去し,飛翔するハスモンヨトウだけを検出し,少しだけ先の動き(飛行位置)を1.4cm程度の精度で予測できる方法を開発した。
害虫の飛行パターンをモデル化し,リアルタイムで計測される位置と組み合わせた。画像撮影から害虫の位置計測までの処理時間は0.03秒ほどだが,この間にハスモンヨトウは体長1個分(2~3cm)以上移動する。開発した技術は,0.03秒先の害虫の動きを昼夜問わずに予測できるという。
研究グループは,複数のハスモンヨトウの追尾と飛行位置の予測が可能なモデルとレーザー照射方向の制御を組み込んだシミュレータを開発しており,コンソーシアムでは,2025年までにこの手法による害虫駆除技術の実用化を目指すとしている。