 東京工業大学らの研究グループは,高感度のフレキシブルカメラシートを搭載した,無人インフラ検査のためのユビキタスな電磁波非破壊撮像プラットフォームを開発した(ニュースリリース)。
東京工業大学らの研究グループは,高感度のフレキシブルカメラシートを搭載した,無人インフラ検査のためのユビキタスな電磁波非破壊撮像プラットフォームを開発した(ニュースリリース)。
開発したユビキタスな電磁波非破壊撮像プラットフォームは,①高感度フレキシブルカメラシート,②反射系マルチビューカプセル型イメージャー,③透過系マルチビュー内視鏡,④オールインワン型ロボット支援モニタリングシステムから構成される。
このうち,高感度フレキシブルカメラシートは,CNT薄膜の光熱起電力効果で動作する。素子領域上に化学的ドーピング液を塗布することで,受光による発熱・膜内部での熱拡散・熱拡散に伴う電気信号変換の効率を高められる。
研究では,ドーピング液濃度を変えて,CNT薄膜の光・熱・電気物性を精査することにより,光熱電変換効率の点で最適なドーピング濃度の同定に成功した。その結果,カメラシートの撮像感度を従来の約4倍に高めたとする。
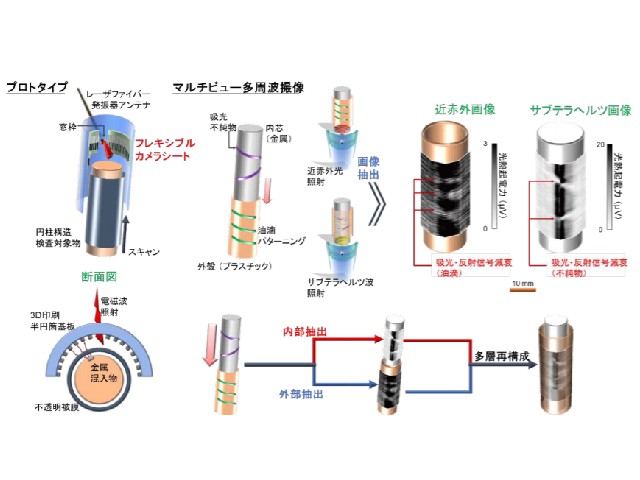
反射系マルチビューカプセル型イメージャーは,検査対象物構造に最適な形状に設計した検査モジュールにフレキシブルカメラシートを装着した。モジュールに取り付けた窓枠から内部に向けて電磁波を照射し,対象物からの反射信号をマルチビューにモニタリングすることで,対象物の異常検知ができる。
また,フレキシブルカメラシートの動作帯域であるミリ波・テラヘルツ波・赤外線照射を使い分けることで,透過率の違いに基づいた多層構造物の任意階層の断層画像を非破壊・非接触で抽出することに成功した。用途として,架空送電線の高速非破壊全方位内部欠陥画像診断を挙げる。
透過系マルチビュー内視鏡のプロトタイプの開発にも成功した。この内視鏡は中空構造の検査に特化しており,対象物内部から外部への電磁波照射に対応する透過信号をマルチビューにモニタリングすることで,対象物の異常検知が可能。このプロトタイプを自動走行ユニット上に実装した自走型全方位内視鏡を開発し,L字型トンネル模型の無人遠隔探査を実証した。
さらに,カメラシートと3Dプリンターで作成した検査モジュール,複数の赤外LEDを一体化させた「携帯式360°アラウンドビューカメラ」を開発した。モジュールには小型光源のサイズに合わせて複数の窓枠を形成し,その内部に計6個の赤外LEDを格納した。これにより,モジュールを回転させることなしに,全視野撮像ができる。
また,各構成要素を多軸関節可動式アームユニット上に集約した「オールインワン型ロボット支援モニタリングシステム」のデモ機も作製。曲がりくねった高所架橋道路模型で,非破壊全方位画像診断を実証した。