 九州大学の研究グループは,ロボット支援腎部分切除術に導入することで腎実質温存に貢献する自動追尾型ナビゲーションシステムを開発した(ニュースリリース)。
九州大学の研究グループは,ロボット支援腎部分切除術に導入することで腎実質温存に貢献する自動追尾型ナビゲーションシステムを開発した(ニュースリリース)。
このシステムは,先端医工学診療部と泌尿器科が共同開発して2016年にロボット支援腎部分切除術に導入された。ロボット手術かつ泌尿器科領域においてこのシステムが導入され,臨床上の有効性が報告された世界で初めての事例だとする。
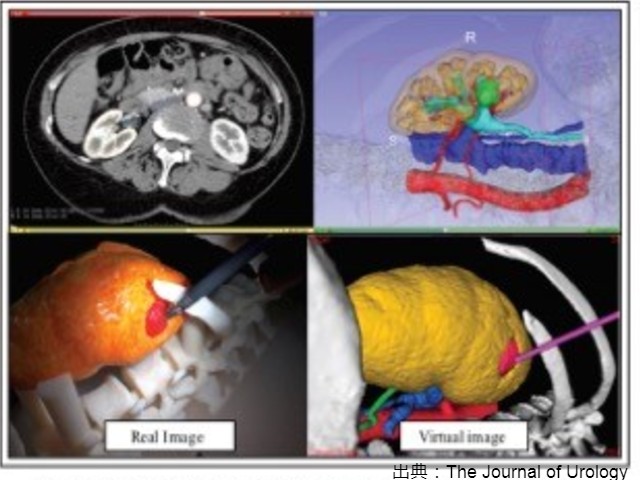
光学式センサーを使用して手術支援ロボットの内視鏡の動きに沿って3D画像が動くように設計され,術者はこのナビゲーション画像を手術支援ロボットのコンソール内でつねに確認することができるようにシステムが構築されている。
視線を術野から逸らすことなく3D画像が持つ解剖情報をリアルタイムに確認することができるという点がこのシステムの特長。その結果,術者は脂肪組織や他の臓器に覆われて表面上は見えにくい腎血管や腎腫瘍についての位置や構造を,3D画像を介して理解することができるようになり,腫瘍の立体構造を理解しながら腎部分切除を行なうことが可能となった。
このシステムを併用したロボット支援腎部分切除術では,併用しない手術と比較してより多くの腎実質を温存することが可能となったという。腎実質の温存は,術後腎機能に最も影響をもたらす因子の一つであり,ナビゲーションシステムにより術後腎機能温存に貢献できる可能性を示すとともに,ナビゲーションシステムが患者へのロボット手術において安全性を高める新たな医療技術になる可能性も示したとしている。