 長崎大学,西松建設の研究グループは,飛行船型水路トンネル調査ロボット「トンネルマンボウ」を開発して,水力発電所水路トンネル(全長約2.6km)の壁面を自律飛行で点検(撮影)することに成功した(ニュースリリース)。
長崎大学,西松建設の研究グループは,飛行船型水路トンネル調査ロボット「トンネルマンボウ」を開発して,水力発電所水路トンネル(全長約2.6km)の壁面を自律飛行で点検(撮影)することに成功した(ニュースリリース)。
水力発電所の水路トンネルの老朽化が進行しており,地震や長期運用の影響もあって,トンネル表面にひび割れ等が発生し,耐久性が低下している。従来,人が断水時の水路トンネル内部に入り点検を行なってきたが,点検距離の長さと崩落危険の問題でロボットによる安全点検が求められている。
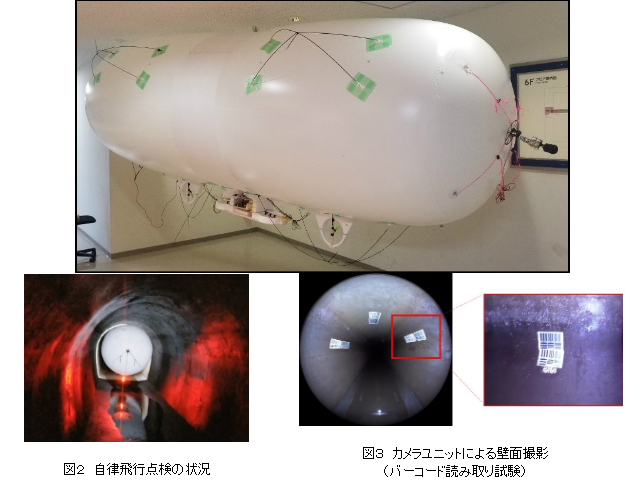
開発したトンネルマンボウは,マルチロータ型飛行船ロボットで,水路トンネルを自律飛行して水路トンネル壁面全周を撮影し点検することが可能となる。搭載されたカメラユニットは,1cm程度の壁面の傷を確認可能で,全長3.7m,直径1.2mの電動となる。飛行ドローンに比べ,消費電力が少なく,機器搭載ペイロードが大きいという特長を有する。
実験では,全長約2.6kmの水路トンネルを断水時に安定且つ安全に自律飛行して壁面点検することに成功した。連続して2度トンネル点検に成功し,機能の再現性も検証できた。点検終了時のバッテリ消費量から最長6kmまで飛行可能と推定されるという。
全国的に水力発電所の見直し機運が高まる中,水力発電所の水路トンネルは,平均経年数約50年でひび割れ,漏水等の老朽化が目立ち,このロボットの活用が期待される。また,施設量が膨大で老朽化が進む農業用水路トンネルの点検への活用も期待できるとしている。