日本原子力研究開発機構(原研)は,小型軽量化に成功した小型軽量コンプトンカメラをロボットに搭載し,遠隔で建屋内のホットスポットを検知することに成功した(ニュースリリース)。
日本原子力研究開発機構(原研)は,小型軽量化に成功した小型軽量コンプトンカメラをロボットに搭載し,遠隔で建屋内のホットスポットを検知することに成功した(ニュースリリース)。
東京電力ホールディングス福島第一原子力発電所(1F)の円滑な廃炉作業に貢献するために,建屋内の汚染分布を遠隔で測定し,高線量率箇所を特定することにより,効率的な除染や効果的な遮へいに反映するための研究開発が進められている。
1Fのサイト内には,ガレキや多くの機器が散在しており,放射性物質は3次元的に分布している。しかも汚染箇所から直接飛来してくる放射線(直達線)だけでなく,直達線が床や機器等に衝突し散乱して飛んでくる放射線(散乱線)も飛び交っている。
このため,サーベイメータを用いた放射線量率の測定だけでは汚染箇所を特定することは困難であり,作業現場全体の測定に時間がかかるといった問題点があった。さらに1F原子炉建屋内は放射線量が高いことから,人が長時間立ち入って線量を測定することも困難だった。
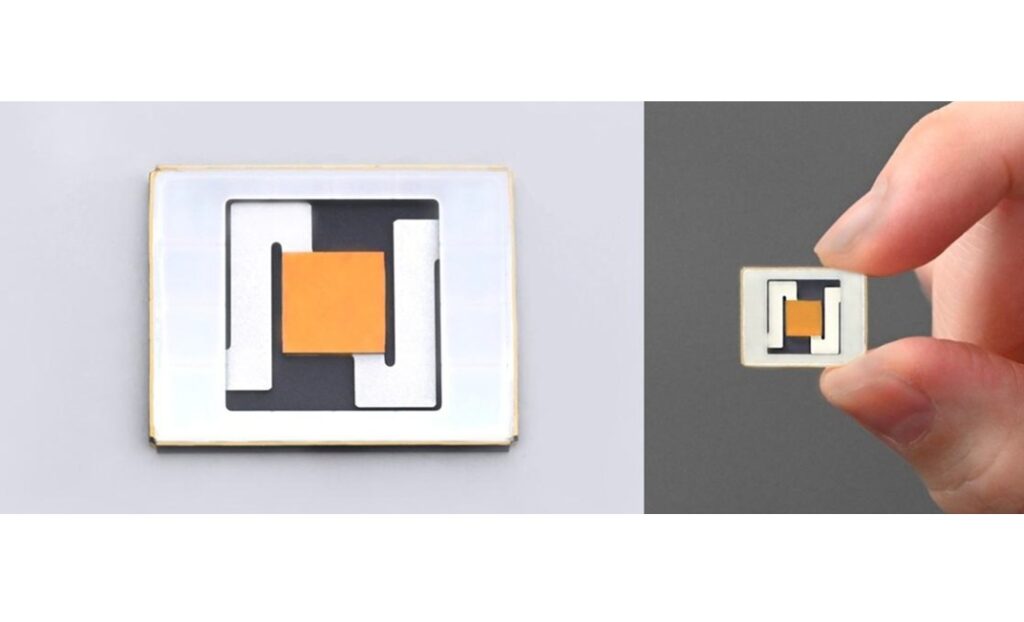
原研は,事故により原子炉建屋内に飛散した放射性物質の分布を可視化するために,小型軽量コンプトンカメラの開発を進めてきた。今回,東京電力ホールディングスが所有するクローラー型ロボット(パックボット)にこの小型軽量コンプトンカメラを搭載し,作業員の立ち入りが困難な1F原子炉建屋内の汚染分布を測定した結果,周囲に比べて線量率の高いホットスポットの検知に成功した。
また作業現場の写真画像にフォトグラメトリー技術を適用することにより,仮想空間上に作業現場の3次元モデルを再構築し,ここにホットスポットを描画することによって作業現場の汚染分布マップを作成した。作成した汚染分布マップはVR(仮想現実)システムへ適用可能であり,ホットスポットの実際の位置を3次元的に把握することが可能となる。
この手法を用いることにより,実際の作業現場におけるホットスポットの位置を容易に把握することができるため,作業員の被ばく線量の低減や,除染計画の立案に役立つことが期待されるとしている。