 新エネルギー・産業技術総合開発機構(NEDO)はプロジェクトにおいて,キュー・アイが開発したダム調査ロボットシステムと,富士フイルムが開発した橋梁点検用ロボットの実証試験を神奈川県内で実施する(ニュースリリース)。
新エネルギー・産業技術総合開発機構(NEDO)はプロジェクトにおいて,キュー・アイが開発したダム調査ロボットシステムと,富士フイルムが開発した橋梁点検用ロボットの実証試験を神奈川県内で実施する(ニュースリリース)。
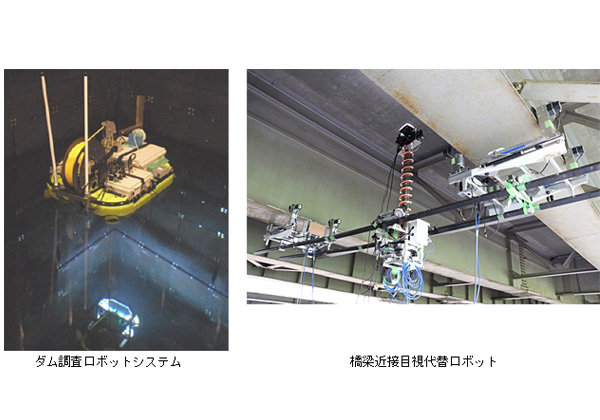
実証実験は,同県内のダムと道路橋で実施し,ロボットの点検支援技術の有効性をそれぞれ検証する。具体的には,キュー・アイは,水上,水中のロボットの連携により,ダム施設の堤体の水中部をカメラで撮影し,その劣化状態の点検を行なうべく,水中ロボットによる壁面の自動調査機能や,水上ロボットが壁面に吸着し,停留する機能等について実証を行ない,その有効性を検証する。
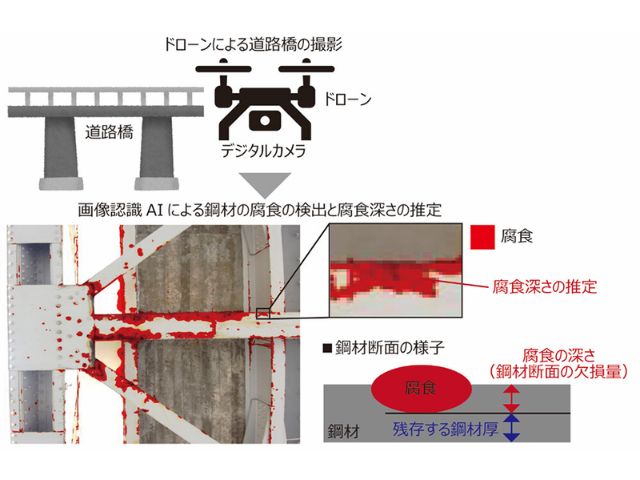
富士フイルムは,イクシスリサーチおよび首都高速道路技術センターと共同で,橋梁点検用のステレオカメラ(複眼式撮像装置)を搭載した橋梁近接目視代替ロボットを開発している。主桁吊下げ型目視点検ロボットが桁下を移動し,桁の撮影および画像処理を行うことで損傷を検出し,近接目視を主体とする点検の支援が可能かなど,その有効性を検証する。
今回の実証実験は,さがみロボット産業特区の取り組みの一環として実施されるもので,今後,両社は神奈川県と連携しながらロボットの早期実用化を目指す。