









 東京農工大学,筑波大学,フランスのコレージュ・ド・フランスの研究グループは,人の歩行データ(歩き方)から個々の感情特性を抽出・作製したモデルを用いて,数学的に感情認識が可能であることを明らかにした(ニュースリリース)。これにより,定量的に人の感情を予測できる可能性が示唆された。
東京農工大学,筑波大学,フランスのコレージュ・ド・フランスの研究グループは,人の歩行データ(歩き方)から個々の感情特性を抽出・作製したモデルを用いて,数学的に感情認識が可能であることを明らかにした(ニュースリリース)。これにより,定量的に人の感情を予測できる可能性が示唆された。
研究では,実際の歩行から得たデータをモデル化し,感情認識に影響を与えるパラメータを調査し(下記①),得られた結果を基にデータベースを構築し,作製した感情認識アルゴリズムを用いて,感情認識の可能性を検証した(下記②)。
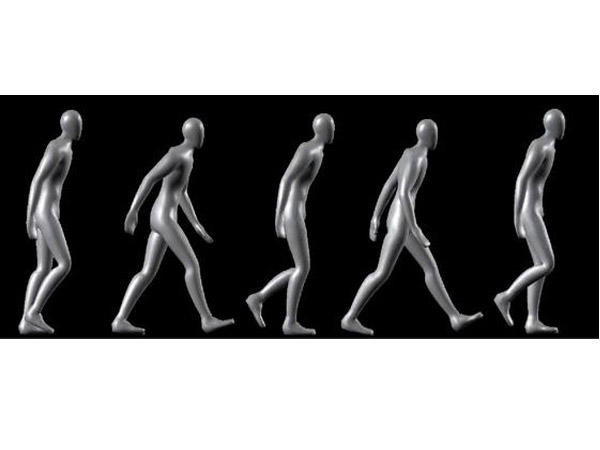
①歩き方動作のうち何に基づき感情を認識しているのか,被験者20人を対象に実験を行なった。4人の演者が5種類の感情(喜怒哀楽恐)を表現した動作をアバター変換で作製したヒューマンモデルを使って,被験者がどのように感情を認識するか調べた。
その結果,速度と姿勢を変化させることにより,被験者が認識する感情が変化した。これによって,速度,姿勢など特定のパラメータが感情認識に影響を与えることが示唆された。
②上記結果に基づき感情認識アルゴリズムを作製し,パラメータ(速度,頭や胴体の姿勢)の重み付けを変えてバリエーションを付加し,感情認識の成功率を検証した。その結果,特定のパラメータが感情認識に大きく影響を与えることが明らかになった。これらにより,全体の動作ではなく一部の動きを見るだけで,感情を認識できることが示された。
この研究成果によって,例えばロボットが近づいてきた人の感情を歩き方で認識し,感情を先読みしてコミュニケーションをとるなど,従来の感情認識ロボットに比して飛躍的な機能進化が期待される。















