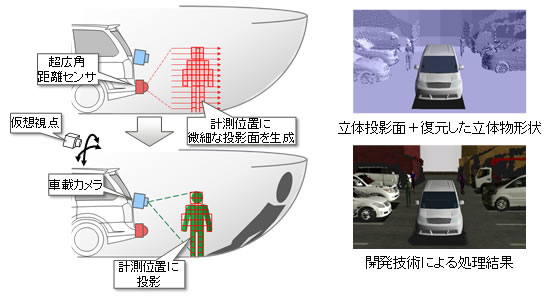
富士通研究所は,ドライバの視界補助向けに,車周辺の人や物などの立体物を歪みなく表示し,接触のリスクを分かりやすく2cmの精度で表現する車載向け3次元映像合成技術を開発した。
従来のマルチカメラシステムでは,合成映像の歪みによって駐車車両や歩行者などの周辺立体物の視認性が劣化するため,ドライバが周囲状況を直感的に把握しにくい,立体物との距離が分かりにくい,といった課題があった。 また,ソナー(超音波)センサとの組み合わせでは,センサの空間解像度が低いため,歪んだ合成映像の中で,大まかな危険領域を示す程度にとどまっており,立体物が込み入った状況ではドライバが瞬時に警告時の状況を認識することが困難だった。
これらの課題を解決するために,今回,前後左右の4台の車載カメラに加え,超広角で高密度な測距情報が得られる3次元レーザレーダを複数併用し,周辺立体物を歪みなく,接触のリスクを分かりやすく表現する車載向け3次元映像合成技術を開発した。
同社は今後,多様な運転シーンで,この3次元映像合成技術による視界補助の効果検証を進めるとともに,この技術を用いた運転支援システムの製品化を目指し,車載組込みプラットフォームで実現するための処理の軽量化を進める予定。また,より利便性の高い認知支援の実現や自動運転への適用を目指して,カメラとレーザレーダを用いた周辺環境を認識する技術の開発も進める予定。
この技術については動画サイトOPTO.TVでも紹介している。
リリースはこちら。