









日立は遠隔操作型移動装置が,長期的・安定的に制御・操作可能となるよう,多重性・多様性を有する無線通信システムを開発した。これはNEDOの「災害対応無人化システム研究開発プロジェクト」によるもの。
開発した無線通信システムは,無線通信中継局と,無線通信中継局同士を接続するケーブル,システム全体を管理するコンピュータから構成される。災害現場における各種移動装置の作業エリアに対し,本無線通信中継局を適切に配置し,必要に応じて複数の無線通信中継局を追加で設置することで,広範囲に安定的な無人化システム用の通信ネットワークが構築でき,各種移動装置の長期的・安定的な制御・操作が実現できる。

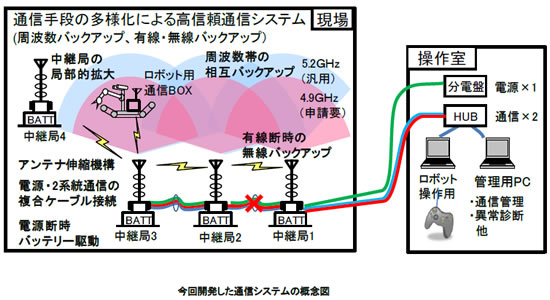
特長として,無線LAN規格(IEEE802.11a/j)に適合する周波数帯から異なる2種類の周波数(5.2GHz、4.9GHz)を採用すると共に,無線通信中継局間の複合ケーブルが断線となる場合でも,通信信号は無線通信中継局間を無線LAN通信にて接続してバックアップできる,有線/無線ハイブリッド方式を採用,冗長性を高めた。
また管理用コンピュータによるモニタリングを可能にし,複合ケーブルの接続部に簡易なロボットアーム/ハンド機構により着脱可能なガイドを取り付けるなど,遠隔よる各操作ができるようにしたほか,各移動装置用通信ボックスを1ボックス構成とし,移動装置上での配置を容易にするなど,災害現場での利便性を重視した。
今後は災害現場における各種移動装置運用のための無線通信環境構築に向け,東北大学大学院情報科学研究科応用情報科学田所研究室と協力し対応する。
詳細はこちら。















