3.3 位相検波法

参照光はプローブ光よりも位相が90°遅れている。点線はプローブ光と参照光を重ねたときの信号,(a)試料によりプローブ光の強度が変化した状況。θ;初期位相,θm;試料計測時にプローブ光強度変調により生じた,重ねた信号の位相変調,(b)光源の強度が変化した場合(強度雑音)の位相変化はない
負荷インピーダンスとして並列共振回路(図5(b))を用いると,パルス繰り返し周波数に応答しつつ,高いインピーダンスを担保し,熱雑音の寄与を下げることができる17, 22)。しかし,この検出信号に対しては,時分割法のBによるaとbの違いが補正できず,要請(ii)と(iii)を満たすことができない21)。そこで,図2におけるRfの光学遅延をパルス繰り返し周期の1/4に変更した21, 23)。
すると,RfはPrに比べて,パルス繰り返し位相が90°遅れる。PuはPrとだけタイミングが一致しているので,試料に入射すると,Prの強度だけが変化する。これらPrとRfを共通の検出素子で検出したときの複素振幅を図6に示す。点線はPrとRfを重ねた信号を表している。試料計測によるPrの強度変調は,重ねた信号の位相変化θmを生じる(図6(a))。一方,光源の強度雑音は,PrとRfで共通なので位相変化を起こさない(図6(b))。従って,重ねたパルス光の位相検波でS/Nが改善される。この方法でもPrとRfが共通の検出素子で検出され要請(i)が満たされる。
位相検波は,同期信号との乗算でできる(図4(b))。パルス繰り返し角周波数をω,Pr=aA(1+m)cos(ωt)とすると,Rfは位相が90°遅れているので,Rf=bAsin(ωt)となる。従って,重ねられた信号Sは,
 ⑷
⑷
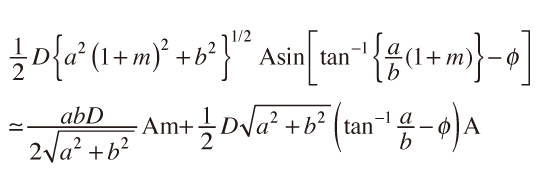
となる。同期信号をDcos(ωt+φ)とすると,Sと同期信号の積の低周波成分(図4(b)の出力1)は,
 ⑸
⑸
である。但し,|m|<<1,|tan–1(a/b)–φ|<<1を仮定した。右辺第一項が信号(と強度雑音を含む振幅Aの積)で,第二項が強度雑音として加算的に寄与する。ここで,
 ⑹
⑹
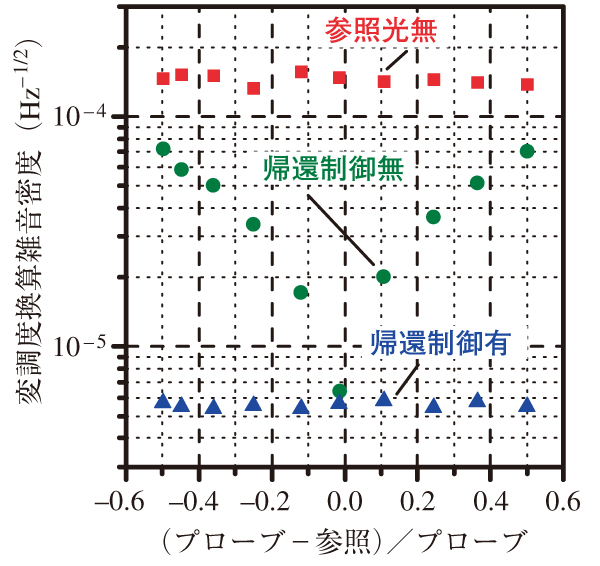
横軸はプローブ光と参照光の強度比を表し,零の時,プローブ光と参照光の強度が等しい。縦軸は雑音の大きさ。赤四角点;参照光が無い場合で従来法と同じ,緑丸点;位相の帰還制御無,青三角点;位相の帰還制御により,プローブと参照光の強度比が等しくなくても雑音を最大限除去
とすると,第二項の加算的な強度雑音を零にできる。また,aとbが違ってもφを補正することで要請(ii)が,さらに式⑸を零にする帰還制御によるφの動的な補正で要請(iii)を満たすことができる。但し,時分割法で述べたのと同様に,帰還制御はmを打ち消さないよう,Puの強度変調よりも遅くする。
図7が雑音打消しの結果で,縦軸が雑音,横軸がPrとRfの強度比である(零はa=bを意味する)。Rfが無い場合が赤四角点で,φをπ/4に固定して帰還制御しない場合が緑丸点である。条件を満たすことで確かに雑音が削減されることが分かる。雑音はおよそ1/30となった。しかし,aとbの比が崩れると,特性が劣化する。しかし,帰還制御によりバランスが崩れても最大限ノイズが削減されることが分かる(青三角点)。