 産業技術総合研究所(産総研)は,カメラとIMU(慣性計測装置)を利用した位置姿勢推定システム(VPS)L-C*(エル シースター)を開発した(ニュースリリース)。
産業技術総合研究所(産総研)は,カメラとIMU(慣性計測装置)を利用した位置姿勢推定システム(VPS)L-C*(エル シースター)を開発した(ニュースリリース)。
低廉なカメラで高精度に位置姿勢を求めるVPSは,多分野で利用が進んでいるが,主要なVPSの多くは位置姿勢推定専用の地図を必要とするという制約があった。
研究では,地図とカメラ画像の照合による位置姿勢の推定と,照合間の動きを補間するセンサー運動の推定,この両者を統合し安定して,かつ少ない計算量でカメラの位置姿勢を求めるVPSを開発した。
システムの中核であるカメラ位置姿勢推定には,L-C*の前身であるC*と同様の技術を利用した。3次元地図とカメラの画像が「一致」する視点を探すのが位置姿勢推定の基本的な処理。この「一致」には多様な定義があり,例えば,「色差」が小さくなることを一致と定義すれば,カメラ画像と色の配置が類似した視点が探し出せる。
しかし,地図作成時から時間が経過し物の配置や天候の変化が起きると,色が変わらないことを前提としている指標では推定が困難になる。これに対し,C*では正規化情報距離を用い,「色の共起性」を一致の指標として地図とカメラ画像を照合する。
これは,色の差を細かに評価する先の例とは対照的に,画像の明るい領域では地図も明るい傾向がある,というような同時性に基づき類似度を測るもの。しかし,C*は照合に多量の計算が必要で,また照合のわずかな失敗で推定が継続できなくなるなどの課題があった。
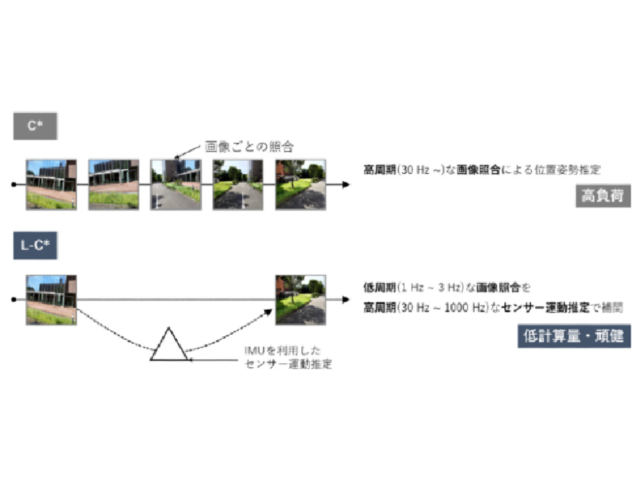
今回,C*をセンサーフュージョンの枠組みで拡張し,照合の安定化,計算量の大幅な低減を可能にした。具体的には,カメラとIMUを利用した計算負荷の低いVisual-Inertial Odometry(VIO)によりセンサーの細かな動きを求め,画像照合間の運動を補う仕組みを導入した。これにより,1Hz程度の低頻度な画像照合であっても安定してVPSを維持可能なフレームワークを構築し,一時的な照合の失敗にも頑健なシステムを実現した。
計算量の多い画像照合を30Hz程度で処理する必要があったC*と比較すると,L-C*の演算負荷は1/30まで低減されており,小型の組み込みPCでも利用可能になった。
シミュレーションを利用した定量評価の結果,推定精度の誤差は最小3mm,悪条件においても最大140mmにとどまった。スマートフォン搭載のセンサーを利用した評価でもシミュレーションと同様,L-C*は激しい動きや回転運動にも安定して追従できるため,実用的な成果が得られた。
研究グループは今後,開発したVPSをさまざまな対象に応用する予定だとしている。