









 東京大学,九州工業大学の研究グループでは,CRC賦存量評価に役にたたせるため開発したホバリング型自律型海中ロボット(AUV: Autonomous Underwater Vehicle)「BOSS-A」を南鳥島沖合の拓洋第五海山の南東肩部において展開し,海底面近傍を2.0mの高度,0.1m/sの速度で自動航行し,搭載する音響センサによりコバルトリッチクラスト(CRC)の厚みを線状に連続計測し,海底面の形状や底質を計測する3次元画像マッピング装置により,CRCの分布を2.0mの幅で連続計測し,人が操作することなく全自動でのCRC調査に初めて成功した(ニュースリリース)。
東京大学,九州工業大学の研究グループでは,CRC賦存量評価に役にたたせるため開発したホバリング型自律型海中ロボット(AUV: Autonomous Underwater Vehicle)「BOSS-A」を南鳥島沖合の拓洋第五海山の南東肩部において展開し,海底面近傍を2.0mの高度,0.1m/sの速度で自動航行し,搭載する音響センサによりコバルトリッチクラスト(CRC)の厚みを線状に連続計測し,海底面の形状や底質を計測する3次元画像マッピング装置により,CRCの分布を2.0mの幅で連続計測し,人が操作することなく全自動でのCRC調査に初めて成功した(ニュースリリース)。
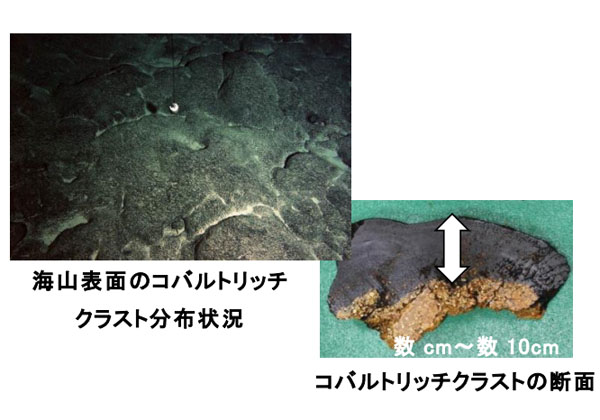
現代産業に欠かせないコバルトや白金を含むCRCは,日本近海の海山の頂上付近に賦存していることが知られている。この貴重な海底鉱物を資源としての価値を評価するには,効率的に賦存量を調査できる技術が必要。
このため,東京大学では,文部科学省の「海洋資源利用促進技術開発プログラム海洋資源広域探査システム開発(新基盤ツール)」における研究開発課題のひとつとして,「コバルトリッチクラストの賦存量調査技術の実用化」を目指した研究を九州工業大学と共同して推進してきた。
広範囲に分布するCRCの賦存領域と開発の適性度を効率的に調査するには段階的に海底の情報を取得する必要。このため,(1)海底から数10mの離れて広範囲の超音波地形調査(2)約10mの高度からCRCの面的な分布を見る高高度3次元画像マッピングと(3)2m高度から詳細なCRC音響厚み計測と高分解能な3次元画像マッピングを行なうための計測機器を搭載して自動航行するAUVを用いた効率的な調査システムの開発を進めている。
この手法に基づき,2015年2月,拓洋第五海山と小笠原海台において,遠隔操作無人探査機(ROV:Remotely operated vehicle)による高高度3次元画像マッピングと「BOSS-A」による詳細音響厚み計測および低高度画像マッピングを実施したが,悪天候に阻まれ十分なAUV潜航ができなかった。
拓洋第五海山でのAUVの本格的展開は,今回の潜航調査がはじめてであり,今回の潜航調査により,CRCの賦存量を評価するのに有益なデータを取得し,AUVを用いた全自動観測手法が確立されたとしている。
今回,2日間という限られた潜航日程において,4回の潜航を行ない,合計で約2.0kmの距離を計測した。調査では,1潜航で最大4時間20分の観測を行ない約1.2kmの測線のデータを計測した。
「BOSS-A」は,搭載する音響センサと画像マッピングシステム(レーザとカメラシステムを組み合わせた低高度用3次元画像マッピングシステム)を搭載しており,2m高度,2m幅の面的なデータ取得が可能。これにより,人が操作することなく全自動でCRCの分布と賦存量を評価するのに有益なデータを取得した。
AUVによるCRCの全自動計測は,世界ではじめてであり,今後,資源開発の適性度を効率的に評価して,最終的に獲得する鉱区を絞り込んでいく日本が実施する戦略的な調査に大きく貢献することが期待される。また,国際海底機構(ISA: International Seabed Authority)もこの技術に注目しているという。
関連記事「岡山大らの水中ロボット,海域での嵌合実験に成功」「JAMSTEC,海底探査用レーザースキャナーを開発」「海洋研究開発機構,次世代カメラシステムによる超深海映像の撮影に成功」














