









 自然科学研究機構 生理学研究所,福島県立医科大学および千葉大学らの研究グループは,脳から上肢の筋肉へ伝えられる信号をコンピュータで読み取り,その信号に合わせて腰髄を非侵襲的に磁気刺激することにより,脊髄の一部を迂回して人工的に脳と腰髄にある歩行中枢をつなぐことで下肢の歩行運動パターンを随意的に制御することに世界で初めて成功した(ニュースリリース)。
自然科学研究機構 生理学研究所,福島県立医科大学および千葉大学らの研究グループは,脳から上肢の筋肉へ伝えられる信号をコンピュータで読み取り,その信号に合わせて腰髄を非侵襲的に磁気刺激することにより,脊髄の一部を迂回して人工的に脳と腰髄にある歩行中枢をつなぐことで下肢の歩行運動パターンを随意的に制御することに世界で初めて成功した(ニュースリリース)。
脳からの信号を四肢に伝える経路である脊髄を損傷すると,損傷領域以外の脳や下肢に問題が無くても歩行障害が生じる。この歩行障害の改善には損傷した脊髄を繋ぎなおす必要があるが,これまで実現できなかった。
ヒトが歩くときの脚の運動リズムや左右肢の交代的な運動パターンは片方の脚の複数の筋肉が複雑に協調して,さらにそれが左右脚で連携して活動することによってでき上がっている。この複雑な筋活動は腰髄に存在する下肢歩行中枢によって生み出されており,人間が歩くときは脳から下肢歩行中枢への指令によって歩行運動パターンが制御されていると考えられている。
研究グループは,脊髄損傷による歩行障害の多くは脳と下肢歩行中枢との繋がりが切れたことが問題であって,脳も腰髄にある下肢歩行中枢もその機能を失っているわけではないということに着目した。そこで,脳活動の情報が内在している生体信号をコンピュータで読み取り,下肢歩行中枢へ伝えることで,脳と下肢歩行中枢を人工的に接続することができれば,脊髄の一部を迂回して下肢の歩行運動パターンを随意的に制御できると考えた。
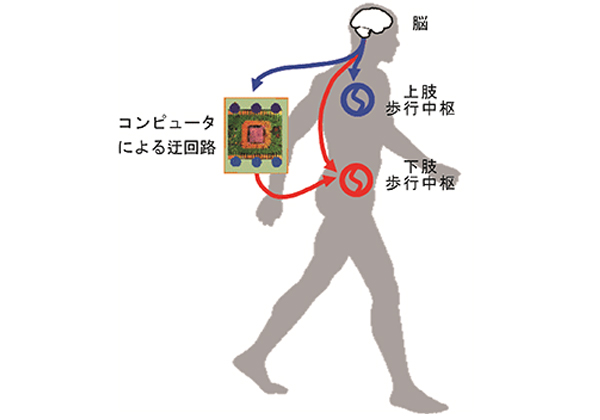
研究グループは神経や四肢に障害のない健常人を対象に,脳活動の情報が内在している電気的信号を手や腕の筋肉から記録した。それをコンピュータで読み取り,その信号に合わせた刺激パルスをリアルタイムで下肢歩行中枢の存在する腰髄へ,非侵襲的に磁気刺激することによって,コンピュータによる脊髄迂回路を形成し,脳と下肢歩行中枢を人工的に神経接続した。
神経や四肢に障害のない健常人にコンピュータによる脊髄迂回路を適用したところ,被験者が下肢をリラックスしている状態であっても,コンピュータによる脊髄迂回路によって下肢の歩行運動パターンを意図的に誘発し,止めることが可能だった。さらに,その歩行サイクルを速くしたりゆっくりしたりと,随意的に歩行の運動パターンを制御可能であることがわかった。この結果は脳から上肢筋へ伝えられる信号が,脊髄の一部を迂回して腰髄にある歩行中枢へ伝えられたことを意味する。
研究グループは,この技術により,脊髄損傷の患者自身の損傷されずに残った機能を利用して,手術なしで随意的な歩行を再建できる可能性を示すことができたとしている。しかしながら,現段階では脚が障害物にぶつかった際の回避運動や立位姿勢の保持は制御できない課題が残っており,今後,慎重に安全性を確認しながら,臨床応用に向けて研究開発を進めて行くとしている。
関連記事「京大,成熟した脊髄内での神経細胞新生に成功」「生理研,サルの手に生じる体性感覚ニューロン活動パターンの推定に成功」「生理研、脳と脊髄の神経のつながりを人工的に強化することに成功」
















