









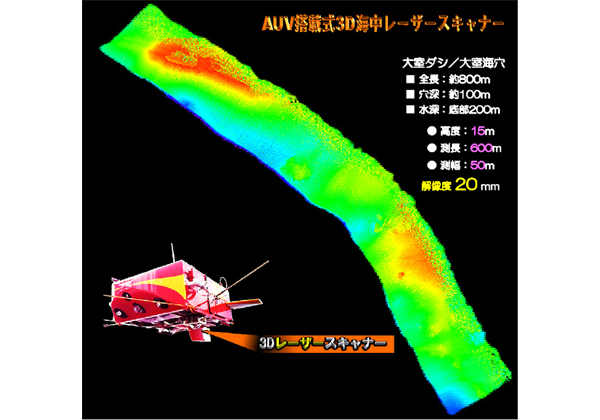
 海洋研究開発機構(JAMSTEC)の研究グループは,内閣府が進める戦略的イノベーション創造プログラム(SIP)の課題の一つである「次世代海洋資源調査技術(海のジパング計画)」において開発を進めている,自律型無人探査機(AUV)搭載式3Dレーザースキャナーを用いて,伊豆大島南方約20kmの大室ダシ・大室海穴内部にある海底熱水噴出域の3D可視化に成功した(ニュースリリース)。
海洋研究開発機構(JAMSTEC)の研究グループは,内閣府が進める戦略的イノベーション創造プログラム(SIP)の課題の一つである「次世代海洋資源調査技術(海のジパング計画)」において開発を進めている,自律型無人探査機(AUV)搭載式3Dレーザースキャナーを用いて,伊豆大島南方約20kmの大室ダシ・大室海穴内部にある海底熱水噴出域の3D可視化に成功した(ニュースリリース)。
光の届かない深海で探査機を使用して海底地形等を調査するには,海中での減衰が少ない音波を用いた音響観測技術を使用することが一般的。
音響観測技術は遠距離から広範囲を効率よく観測できる利点があるが,反面,海底からの距離が遠いため一般的に高精度な観測には不向きであり,生物や地形等の詳細な情報を得るには近距離からのカメラ観測技術に頼る必要があるが,海底に接近し過ぎると探査機の航行自体に危険が伴うという問題がある。
そこでJAMSTECでは,音響観測とカメラ観測の両者の短所を補完し,比較的広い範囲を中距離から高精度に観測できる第3の観測技術として,レーザー光を用いた海中レーザースキャニングについて取り組んできた。
2013年にはAUV「おとひめ」に3Dレーザースキャナーの一次試作機を搭載し,手石海丘周辺域(相模湾)において約150mに及ぶ海底面3Dデータの取得にも成功した。
今回開発したAUV搭載式3Dレーザースキャナーは,寸法・重量を大きく削減しつつも,スキャニング解像度および検出感度は一次試作機の数倍にまで向上している。また,AUVの姿勢による僅かな位置情報の変化を正確に反映してスキャニングすることができる。
システム内部は放熱管理を考慮した各機器配置とし,海底からの反射光を正確に受光できるように,それ以外の散乱光を遮断する構造とした。
検証機には,以前より当該技術の研究を共同で進めてきた三菱電機特機システムと,JAMSTECの探査機技術および海中光学技術の知見が組み込まれている。これにより国産技術において,世界でも類の無い高感度で高性能なAUV搭載式3Dレーザースキャナーが開発された。
2015年10月31日,3Dレーザースキャナーを「おとひめ」に搭載し,海域試験を実施した。強い流れ場のある狭域において「おとひめ」は姿勢を静定させながら終始安定して自律航行し,海中レーザースキャニングを非常に良好な状態で実施した。
その結果,調査海域の多くの特異点を海中レーザースキャニングにより3D可視化することに成功した。特にごく小規模のチムニーやマウンド(高まり)などが,従来の音響観測技術では表現できない精度で可視化されており,また熱水噴出域では,通常のカメラ観測技術では撮影が困難な熱水噴出状態までもが複数,鮮明に可視化された。
さらに,これらすべての3D可視化画像は三次元位置情報(x,y,z位置)を保有する点群により構成されているため,長さ・面積・体積など,任意の幾何学情報を取得することが可能であり,数cm単位での正確な計測に成功した。
今回開発されたAUV搭載式3Dレーザースキャナーは,今後の海洋資源調査に大きく貢献する画期的な観測技術。対象や事象を単に「捉える」のみであった従来の音響観測技術やカメラ観測技術による可視化から一歩進んで,「測る」ことまでも同時に実現する。
研究グループでは今後,更なる高感度化,高解像度化に取り組むと同時に,海中光学の理解をより深めていくことにより,この新技術の汎用性,環境適応性を進捗させ,海洋資源調査のみならず多種多様な海中研究分野に広く利用されることをめざす。
関連記事「【モーターショー】パイオニア,開発中のLiDARなど展示」「【モーターショー】オムロン,赤外線センサーの方向性を提示」「レーザスキャナ計測による作物の生育診断方法」「Valeoが開発する車載向けレーザスキャナ」「筑波大など、レーザスキャンにより巨大な都市構造を発見」














