 東京工業大学と東京医科歯科大学の両大学発のベンチャー企業 リバーフィールドは,小型・軽量で操作性に優れた内視鏡ホルダーロボット「EMARO(エマロ):Endoscope MAnipulator RObot」を開発し,今年8月より販売を開始する(ニュースリリース)。
東京工業大学と東京医科歯科大学の両大学発のベンチャー企業 リバーフィールドは,小型・軽量で操作性に優れた内視鏡ホルダーロボット「EMARO(エマロ):Endoscope MAnipulator RObot」を開発し,今年8月より販売を開始する(ニュースリリース)。
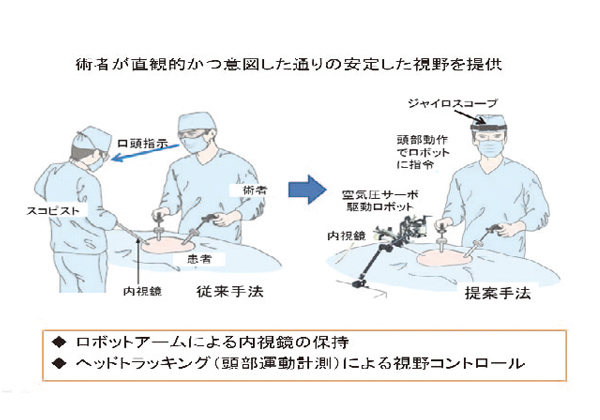
近年,外科手術において,開腹手術に代わって低侵襲手術が広く行なわれており,特に内視鏡外科手術が注目されている。内視鏡の操作にあたっては,スコピストと呼ばれる助手の医師が内視鏡を持ち,執刀医の指示に従って術野を確保する必要がある。
その際,執刀医との円滑な意思疎通が求められることや手振れの発生などが問題となっており,内視鏡操作を支援する新たな医療機器の需要が高まっている。既存の内視鏡ホルダーロボットは電動モータ駆動を用いており,動きに柔らかさを出すには不向だった。
開発したロボットは頭部にジャイロセンサを装着した執刀医が,頭を上下・左右に傾けると,その動きを感知して,空気圧で内視鏡を動かす。動く自由度は,内視鏡の抜き差し(前後),上下,左右,そして回転の4つがあり,頭部の動きと足元のスイッチを組み合わせて制御する。
従来,超精密制御を要求される手術関連のロボットに連続的な空気圧制御を行なうことは困難だったが,東京工業大学の技術を基盤として,厳密なモデル化と独自の制御技術の導入により極めて精密な空気圧制御を実装することに成功した。
空気圧駆動は産業用ロボットなどでも掴む動作に使われているように,動きが非常に柔らかく滑らかで,しかも安全性が高いという利点がある。また,直径約10㎜と注射器サイズの小さなシリンダーへの空気の出し入れだけで大きな出力を得ることができる機構のため,大幅な小型化・軽量化を図ることができる。
開発したEMAROを用いることにより,執刀医はスコピストを介することなく,望む画像を手ぶれなしに得ることができ,より正確な手術を行なうことができる。また,スコピストの役目をEMAROが担うため,医師不足に悩む中小規模の病院でも腹腔鏡手術が可能となり,より多くの患者がこの手術を受けられるようになる。
EMAROは超精密空気圧制御技術を生かした手術関連ロボットの第一弾。研究グループでは現在,空気圧駆動型の鉗子を有する手術支援ロボットシステムを開発している。このロボットは,鉗子にかかる力を空気圧を通じて検出し,執刀医にフィードバックできる。
手術支援ロボットでは,執刀医は患者から離れたところにあるコンソールの前に座り,内視鏡の画像を見ながら両手でコントローラを動かして鉗子や内視鏡を操作しする。力覚があれば,自分の手で直接手術しているような感覚をもてるので,手術の精度がより高くなると期待されている。
関連記事「8K 内視鏡・顕微鏡の臨床応用に成功─ MIC が成果を発表」「MIC,8K内視鏡を用いた手術に成功」「愛媛大,手術支援ロボット da Vinci を用いた肺がん手術に成功」「NEDO,世界市場の獲得を狙う医療機器システム開発プロジェクトに着手」